 |
上海壹僑國際貿易有限公司
主營產品: 德國工業備品備件,優勢代理,PILZ繼電器,DOLD傳感器,GEMU蓋米閥/流量計,ODU插頭,JUMO傳感器,VEM電機,BUCHER閥門泵等等 |

聯系電話
13482106932

公司信息
- 聯系人:
- 吳小姐
- 電話:
- 021-69513882-819
- 手機:
- 13482106932
- 傳真:
- 86-021-69513882
- 地址:
- 上海市嘉定區江橋鎮沙河路66號A幢201室
- 郵編:

| 參考價 | 面議 |
- 型號
- 品牌
- 廠商性質 經銷商
- 所在地 上海市
更新時間:2024-06-01 18:26:26瀏覽次數:1173
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
WESTLOCK EL-020602UK
WESTLOCK 2649S-SPVECL-10
WESTLOCK 2645ABYN0CS22FAN-AR2 整單有效
WESTLOCK C3479-NO-W300更新的部件號34793B2M06
WESTLOCK STK3001985 - 2004NBY2A2M0200U
WESTLOCK 3349ABYN0CS22FAN-AR1
WESTLOCK 停產2007SBY2B2M04CS相同規格產品的新零件編號。
WESTLOCK 2649ABYN00022FANAR2
WESTLOCK STK3001985 - 2004NBY2A2M0200U
WESTLOCK 停產2007SBY2B2M04CS相同規格產品的新零件編號。
WESTLOCK 3349ABYN0CS22FAN-AR1
德國西鎖WESTLOCK西索2649S-SPVECL-10 德國西鎖WESTLOCK西索2649S-SPVECL-10
機械手由結構框架、X軸組件、Y軸組件、Z軸組件、工裝夾具以及控制柜,六部分組成。
其中:
1,結構框架,主要由立柱等結構件組成,其作用是將各軸架空至一定高度,多由鋁型材或方管,矩形管,圓管等焊接件構成;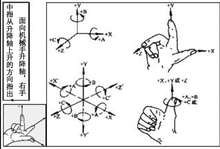
2,X軸組件、Y軸組件、Z軸組件,三個運動組件為桁架機械手的核心組件,其定義規則遵循笛卡爾坐標系[1] 。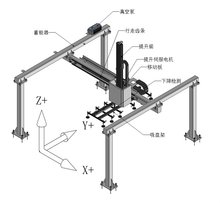
各軸組件通常由結構件、導向件、傳動件、傳感器檢測元件以及機械限位組件等五部分組成。
1),結構件通常由鋁型材或方管,矩形管,槽鋼,工字鋼等結構組成,其作用是作為導向件、傳動件等組件的安裝底座,同時也是機械手負載的主要承擔者。
2),導向件,常用有直線導軌,v型滾輪導軌,U型滾輪導軌,方型導軌以及燕尾槽等常用導向結構,其具體運用需根據實際使用工況以及定位精度決定。
3),傳動件,通常有電動,氣動,液壓三種類型,其中電動有齒輪齒條結構,滾珠絲杠結構,同步帶傳動,鏈條傳統以及鋼絲繩傳動等。
4),傳感器檢測元件,通常兩端采用行程開關作為電限位,當移動組件移動至兩端限位開關處時,需要對機構進行鎖死,防止其超程;此外還有原點傳感器以及位置反饋傳感器。
5),機械限位組,其作用是在電限位行程之外的剛性限位,俗稱死限位。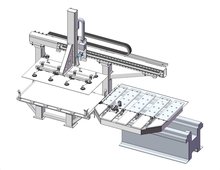
3,工裝夾具,根據工件形狀大小材質等有不同形式,如:真空吸盤吸取,卡盤夾取,托取或針式夾具插取等形式。
4,控制柜,其相當于與桁架機械手的大腦作用,通過工業控制器,采集各傳感器或按鈕的輸入信號,來發送指令給個執行元件按既定動作去執行。
折疊編輯本段產品特色
其特點:
1,高效--------其各軸以*的速度直線運行,可用伺服電機快速響應;
2,穩定-------極小的重復性誤差,最高可達0.05mm;
3,高強度------7x24小時工作,不需要吃飯、睡覺、抽煙等;
4,高精度------定位精度可達0.02mm(基于制作成本原因,可根據使用工況適當放大定位精度);
5,性價比高------相比關節機器人,其負載重量大,制作成本低,適合于"中國智造"基本國情;
6,作簡單------基于直角坐標體系,其運動參數較為簡單。
發展歷史
機械手首先是從美國開始研制的,其在國外有較完善的運用。
1958年美國聯合控制公司研制出*臺機械手。
它的結構是:機體上安裝一個回轉長臂,頂部裝有電磁塊的工件抓放機構,控制系統是示教形的。
1962年,美國聯合控制公司在上述方案的基礎上又試制成一臺數控示教再現型機械手。商名為Unimate(即萬能自動)。運動系統仿照坦克炮塔,臂可以回轉、俯仰、伸縮、用液壓驅動;控制系統用磁鼓作為存儲裝置。不少球坐標通用機械手就是在這個基礎上發展起來的。同年,美國機械制造公司也實驗成功一種叫Vewrsatran機械手。該機械手的中央立柱可以回轉、升降采用液壓驅動控制系統也是示教再現型。這兩種出現在六十年代初的機械手,是后來國外工業機械手發展的基礎。
1978年美國Unimate公司和斯坦福大學,麻省理工學院聯合研制一種 Unimate-Vicarm型工業機械手,裝有小型電子計算機進行控制,用于裝配作業,定位誤差小于±1毫米。聯邦德國KnKa公司還生產一種點焊機械手,采用關節式結構和程序控制。
機械手控制系統發展歷史
機械手控制系統首先是從美國開始研制的。1954年美國戴沃爾最早提出了工業機器人的概念,并申請了。該的要點是借助伺服技術控制機器人的關節,利用人手對機器人進行動作示教,機器人能實現動作的記錄和再現。這就是所謂的示教再現機器人控制系統。現有的機器人控制系統差不多都采用這種控制方式。1958年美國聯合控制公司研制出*臺機械手鉚接機器人控制系統。作為機器人產品最早的實用機型(示教再現)是1962年美國AMF公司推出的"VERSTRAN"和UNIMATION公司推出的"UNIMATE"。這些工業機器人和相關控制系統主要由類似人的手和臂組成它可代替人的繁重勞動以實現生產的機械化和自動化,能在有害環境下作以保護人身安全,因而廣泛應用于機械制造、冶金、電子、輕工和原子能等部門。
機械手控制系統經歷了以下幾個階段:機械手完成放射源轉運年代、化工產品垛機械手年代、工業用機械手興起和發展年代。
隨著汽車行業和塑膠行業的發展,西歐、日本、蘇聯和中國等地域機械手及其控制系統也開始百花爭放。
尤其注塑機機械手,發展更為迅猛,應用非常普遍,其控制系統經過幾十年的發展,現在已經趨于成熟和完善。
機械手控制系統的流派及品牌(塑膠)
注塑機機械手流派控制系統可以按地域劃分為歐美類,日本類,中國類。歐美和日本發展較早,技術相對較為完善。國產機械手控制系統起初主要是引進國外,但近一二十年來中國在這一方面的開發研究生產可謂是突飛猛進,如今國產機械手控制系統已逐步成熟,且國產價格相對比較低。中國的有中國臺灣天行、大陸華成工控,歐洲西格瑪泰克、KEBA、日本星機和哈默。
機械手控制系統的種類是根據硬件的不同而加以分類的,主要有斜臂、橫走,按驅動方式可分為氣動、變頻、伺服。每個大類又有數個小種,而不同的小種又因不同的動作程序而不同。
斜臂機械手控制系統用于500T以下注塑機,動作程序有二三十套,最高距離精度可達到0.05mm,橫走機械手控制系統用于1600T內注塑機動作程序有四五十套,最高距離精度可達到0.05mm,而超大型注塑機則需配專門的控制系統 。
折疊編輯本段系統組成
(注塑機機械手斜臂套)
工業機械手控制系統一般包括主控板、轉接板、顯示器、控制按鍵、配套電源等部分。下面主要針對工業機械手控制系統做下介紹。
主機
主機包括主控板,顯示屏,按鍵。其中主控板由單片機和相應電路板組成,單片機負責程序運行,電路板處理輸入輸出信號。(圖左)
轉接板
轉接板主要包含一些端子和繼電器,其功能是信號的轉接。 (圖上中)
配套電源及其他
電源用于控制系統供電,如蜂鳴器則是用于機器故障報警所用。
折疊編輯本段系統前瞻
現代計算機技術的產業革命,將世界經濟從資本經濟帶入到知識經濟時代。在電子世界領域,從20世紀中的無線電時代也進入到21世紀以計算機技術為中心的智能化現代電子系統時代。而機械手控制系統則逐步發展為與計算機互聯,使機械手控制系統更加智能化,作更加簡單方便。
隨著自動化的發展,機械手(機器人)應用將更加普遍。而沒有控制系統的機械手卻是一堆廢鐵,機械手的發展勢必與控制系統雙駒并馳。而日后機械手的發展也會受限于控制系統的發展,未來的人類社會將是機械手的時代。


