機器人的末端工具能在機器人或它的工具在發生碰撞時提前或同步檢測到這個碰撞。與其它的保護設備一樣,ATI的防碰撞傳感器發送1個信號給機器人的控制柜,當機器人發生碰撞時會立即停止或者避免。機器人碰撞保護設備就是機器人防碰撞傳感器,同時它也被認為是一種機器人過載保護裝飾,快速停止裝置,機器人安全法蘭,或者機器人碰撞保護器。
ATI碰撞傳感器保護貴重的機器人工具 保護裝置是ATI工業自動化公司技術的碰撞傳感器,它設計用在機器人碰撞時對貴重末端執行器的保護。保護裝置有以下特點:自動復位、高重復精度、大力矩轉動、設計堅固并且成本低。
什么是機器人防碰撞傳感器?
機器人的末端工具能在機器人或它的工具在發生碰撞時提前或同步檢測到這個碰撞。與其它的保護設備一樣,ATI的防碰撞傳感器發送1個信號給機器人的控制柜,當機器人發生碰撞時會立即停止或者避免。機器人碰撞保護設備就是機器人防碰撞傳感器,同時它也被認為是一種機器人過載保護裝飾,快速停止裝置,機器人安全法蘭,或者機器人碰撞保護器。
自動的復位特性有助于工廠的安全。當機器人發生碰撞后,ATI的防碰撞傳感器可以在機器人離開碰撞位置后自動復位,或者當扭轉角度變得小于20-25°后。
在X,Y和Z軸上具備浮動量,相對于通過禁止進入機器人工作區域來說,這個能力可以提供一個更安全的辦法
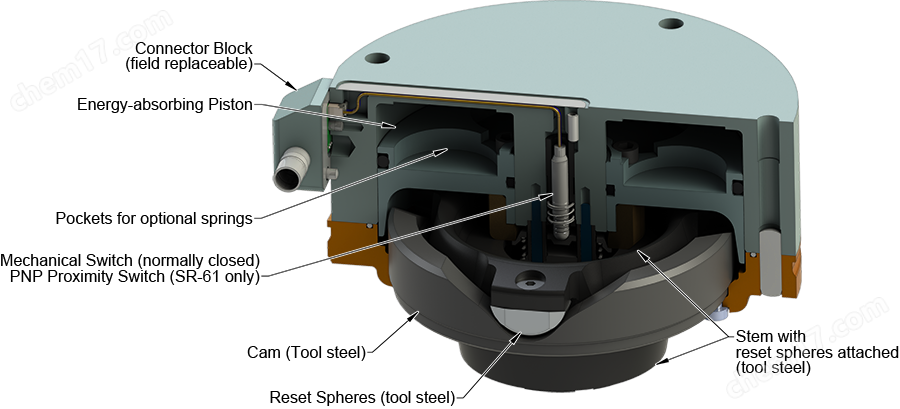
隨著傳感器的良好的角度方面的浮動性,還提供一個作為選配項的彈簧用來提供3個不同的跳變扭矩點。這個特性可以提供額外的浮動性。同時,可以提供一路氣壓來擴大扭矩能力以便滿足需要更大慣性的運動需要。這個氣壓值也可以釋放掉,僅僅讓彈簧提供一個較低的慣性運動時的需要。 |  |
The unit has been tested to operate ten thousand cycles without fail.
傳感器的功能特性能很好的保護機器人和工具,具備很好的投資效益。同時,減少故障停機時間,降低人為干預的需要。
特性
高重復定位精度。 發生碰撞后,高精度的定位組件可以讓傳感器恢復到原來的位置,誤差小于0.001英寸
常用的運動范圍 在碰撞過程中,傳感器可以順從于任何一個類型的碰撞(角度、軸向、扭轉),讓機器人有足夠的時間采取修正行動
結實的軸向浮動設計 傳感器在設計和制造上非常結實可靠,部件的設計采取高強鋼,所以有時也被用來作為一個浮動裝置來保護機器人末端執行工具。
它可以為大多數應用提供角度和扭矩方向的浮動。
能量吸收 在發生碰撞過程中,傳感器可以吸收能量,用來保護設備。這些能量將伴隨著碰撞移除過程而重新釋放出來。
靜態的跳變反饋 在一個給力的獨立的壓力下,不管是角度、軸向還是扭轉方向的碰撞,其跳變點反應都是恒定的。
柔性的安裝面設計 通孔設計提供更大的柔性安裝面
自動復位 在發生碰撞后,當機器人把工具搬運離開碰撞點后,傳感器能自動復位
可增加彈簧這個選項,提供了2個跳變點 施加一路壓縮空氣時一般用來得到一個較高的跳變點,用來檢測一個較高慣性的運動。
當不施加壓縮空氣,僅僅利用增加彈簧這個選項,可以用來檢測一個較低的慣性運動的跳變點
快速的碰撞偵測時效 2根線的閉路可以配置成常開或常閉,直流或交流。軸向的0.02英寸的運動都能被觸發。一個常用的接頭用來傳輸碰撞信號。
現場可重新組裝式設計。
現場模塊化可替換接頭。
IP65外殼保護等級(此項需增加額外的成本)
| 型號 | 角度位移 | 軸向位移 | 重量 | 跳變力矩 | 軸向跳變 |
|---|
| SR-48 | 13 | 0.2 in | 0.55 lb | 20 lbf-in - 53 lbf-in | 100 lbf |
| SR-61 | 11 | 0.22 in | 0.7 lb | 60 lbf-in - 250 lbf-in | 200 lbf |
| SR-81 | 13 | 0.34 in | 1.28 lb | 120 lbf-in - 520 lbf-in | 380 lbf |
| SR-82 | 13 | 0.34 in | 1.28 lb | 120 lbf-in - 520 lbf-in | 380 lbf |
| SR-101 | 12 | 0.4 in | 2.6 lb | 240 lbf-in - 1100 lbf-in | 610 lbf |
| SR-131 | 10 | 0.46 in | 5.1 lb | 670 lbf-in - 3000 lbf-in | 1100 lbf |
| SR-176 | 10 | 0.63 in | 12 lb | 1600 lbf-in - 7100 lbf-in | 2000 lbf |
| SR-221 | 8 | 0.63 in | 25.1 lb | 3900 lbf-in - 17000 lbf-in | 3100 lbf |














 化工儀器網
化工儀器網