 化工儀器網
化工儀器網










詳細介紹
行走動力學分析系統供貨
行走動力學分析系統供貨
行走動力學分析系統, ,
一站式3D動作捕捉分析系統
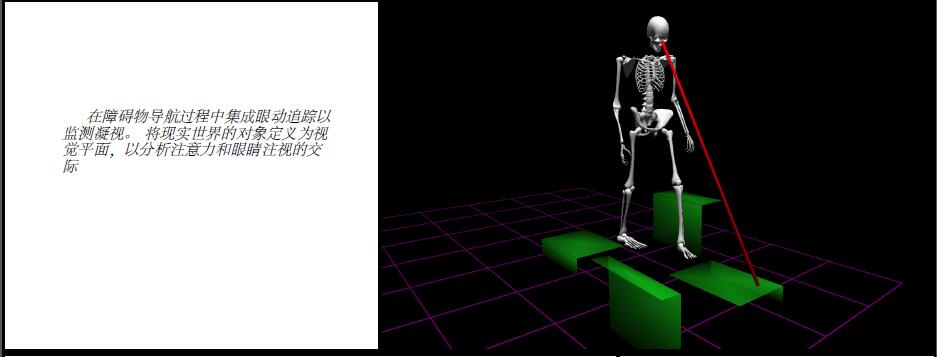
之可神經調控的步態動作捕捉分析

該系統是一套一站式交鑰匙 3-D 運動捕捉與數據整合分析系統,旨在同步收集來自各種運動跟蹤器、EMG()、測力臺、手傳感器、EEG腦電圖、
定量腦電圖(quantitative EEG, qEEG)系統、數字視頻、事件標記和其他模擬設備、虛擬現實和觸覺設備的數據,用于臨床,生物力學,神經控制和涉及復雜運動分析的體育藥物等應用。
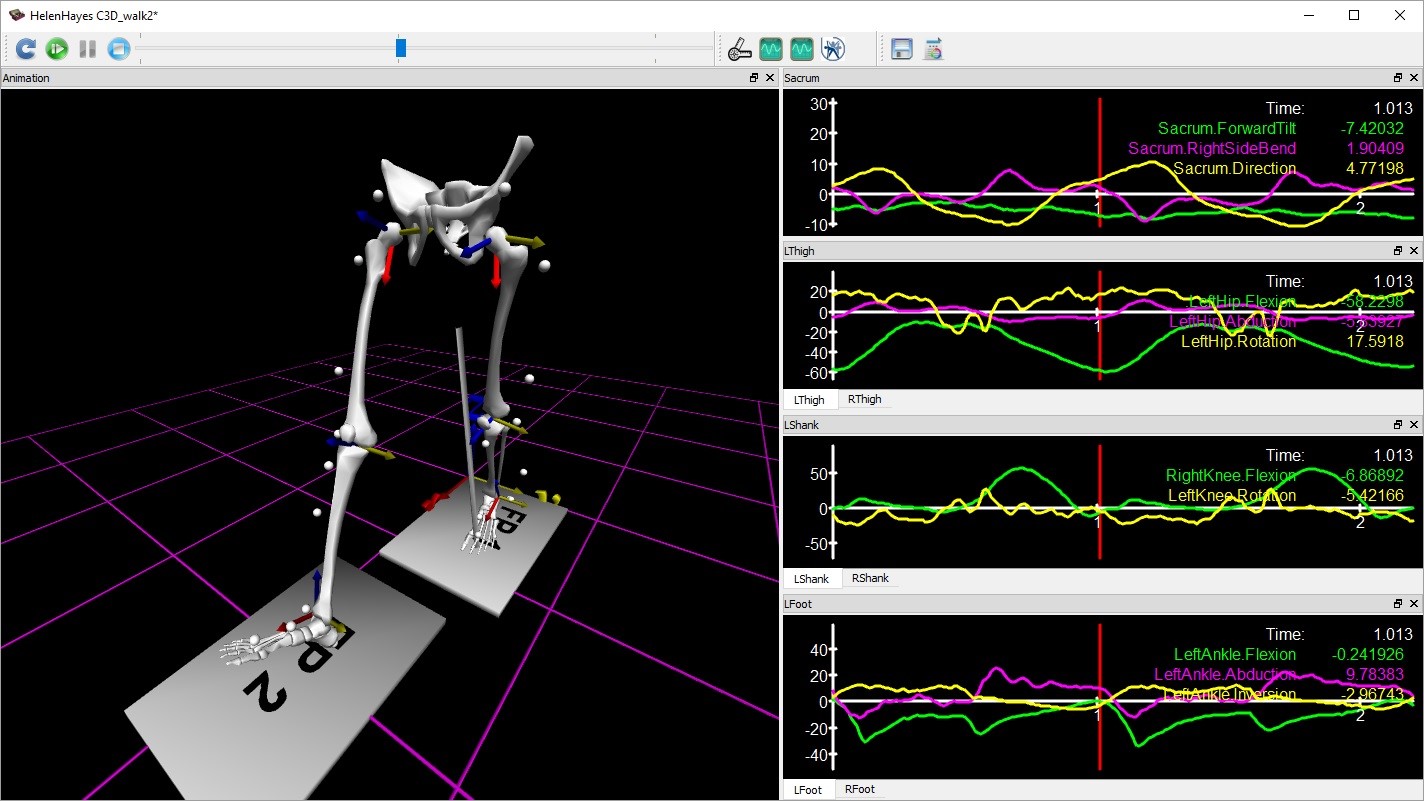
該系統從豐富分析工具集合中生成的數據可立即通過所有數據輸出的圖形顯示進行回放。 令人驚嘆的 3D 計算機渲染對象動畫可以被視為骨架、簡筆畫或人形。
集成使用市場上廣泛硬件實現對人體運動、大腦活動、眼球運動、肌肉募集和作用在身體上的外力實時測量。
該系統可以集成運動動作捕捉所有市場主流廠家硬件,與其他組件準確定位,數據*同步。確保您選擇的組件協同工作,并使用的計算機渲染和圖形顯示實時呈現。
步態eeg emg整合系統,步態分析系統,步態分析運動控制分析系統,CT-MRI增強步態,三維步態捕捉分析系統,步分析系統,神經肌肉骨骼協調分析系統,神經調控的步態捕捉分析系統,步態特征捕捉分析系統,CT-MRI Augmented Gait
之可神經調控的步態動作捕捉分析系統
一、配置:
根據需求配置各種運動跟蹤器、EMG()、測力臺、手傳感器、EEG腦電圖、
定量腦電圖(quantitative EEG, qEEG)系統、數字視頻、事件標記和其他模擬設備、虛擬現實和觸覺設備以及數據同步分析軟件。
步態捕捉分析系統,步態腦電圖整合分析系統,人體運動步態分析系統,步態特征捕捉分析系統,步態分析系統,神經肌肉協調控制步態捕捉分析,神經肌肉骨骼協調分析系統,核磁共振增強步態捕捉分析系統,行走動力學分析系統,步態肌電腦電整合分析系統

二、步態分析:
提供通過立即回放步態試驗和生成報告來執行實時收集的能力
靈活性
使用預定義的 6 自由度剛體或任何標記集進行快速、簡單和準確的設置。使用 Bell、Davis 或功能方法或從用戶定義的解剖標志定義虛擬髖關節中心。
行走動力學分析系統,步態特征分析系統,步態生物力學分析系統,神經肌肉骨骼協調分析系統,步態捕捉分析系統,步態分析運動控制分析系統,三維步態捕捉分析系統,神經網絡識別步態模式系統,步態腦電圖整合分析系統,步態生物力學分析裝置
記錄
行走動力學分析系統,神經肌肉骨骼協調分析系統,步態eeg emg整合系統,步態肌電腦電整合分析系統,步態儀分析系統,步態特征捕捉分析系統,三維步態捕捉分析系統,步態與上肢力學分析系統,CT-MRI增強步態,三維運動及動作捕捉分析系統
使用測力臺撞擊或腳踏開關等事件作為觸發,免提記錄單次或多次試驗。查看處理數據的實時流以確保質量跟蹤
混動動作
三維運動及動作捕捉分析系統,步態動力學分析系統,步態儀分析系統,神經肌肉調控的步態捕捉分析系統,步態分析運動控制分析系統,步態捕捉分析系統,步態特征分析系統,步態eeg emg整合系統,核磁共振增強步態捕捉分析系統,步態肌電腦電整合分析系統
在單個應用程序中同時利用兩種不同的運動跟蹤技術的優勢。例如,當視線干擾標記跟蹤時,使用 IMU 跟蹤標記點。
數據分析
訪問原始和處理過的運動學和動力學數據,以及創建用戶定義的公式和變量。通過顯示標準偏差和/或散點圖的整體平均數據輸出執行肌肉建模和數據縮減。單擊按鈕即可生成標準或定制的步態報告。
自主步行
使用 Bertec 的儀表跑步機,動態控制帶速度和加速度以實現自定步調步行。使用視覺/音頻提示和目標顯示器進行步態重新訓練,或使用 180 度顯示圓頂添加更加身臨其境的體驗。
步態動力學分析系統,計算機斷層掃描增強步態捕捉分析系統,核磁共振增強步態捕捉分析系統,步分析系統,斷層掃描核磁共振增強步態捕捉分析,三維步態分析人體運動力學分析系統,步態分析系統,步態儀分析系統,步態控制分析系統,步態與上肢分析系統
三、步態報告:提供一鍵生成標準化步態報告的能力。
三維步態捕捉分析系統,神經肌肉調控的步態捕捉分析系統,步態分析系統,步態與上肢分析系統,步態肌電腦電整合分析系統,核磁共振增強步態捕捉分析系統,一站式步態捕捉分析系統,步態動力學分析系統,步態特征捕捉分析系統,神經肌肉協調控制步態捕捉分析
靈活性
使用預定義的 6 自由度剛體或任何標記集進行快速、簡單和準確的設置。 使用 Bell、Davis 或功能方法或從用戶定義的解剖標志定義虛擬髖關節中心。
記錄
神經網絡識別步態模式系統,CT-MRI Augmented Gait,神經肌肉骨骼協調分析系統,神經肌肉協調控制步態捕捉分析,步分析系統,步態eeg emg整合系統,步態與上肢分析系統,計算機斷層掃描增強步態捕捉分析系統,步態生物力學分析系統,CT-MRI增強步態
使用測力臺撞擊或腳踏開關等事件作為觸發,免提記錄單次或多次試驗。 查看處理數據的實時流以確保質量跟蹤。
數據分析
訪問原始和處理過的運動學和動力學數據,包括關節力矩和力。 創建用戶定義的公式和
變量。
行走動力學分析系統,神經肌肉調控的步態捕捉分析系統,步態與上肢分析系統,三維步態分析人體運動力學分析系統,步態分析運動控制分析系統,斷層掃描核磁共振增強步態捕捉分析,步態腦電圖整合分析系統,一站式步態捕捉分析系統,步態肌電腦電整合分析系統,步態動力學分析系統
自主步行
使用 Bertec 的儀表跑步機,動態控制帶速度和加速度以實現自定步調步行。 捕獲和分析每一步的動力學數據。
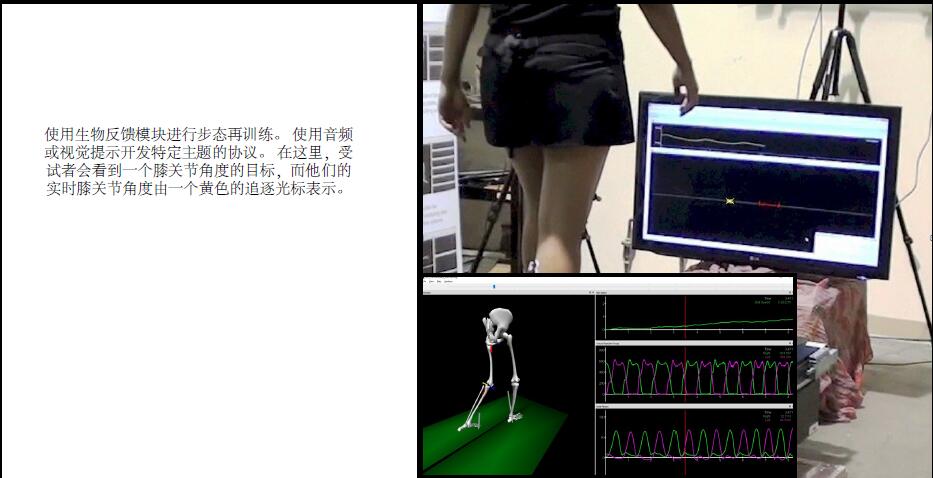
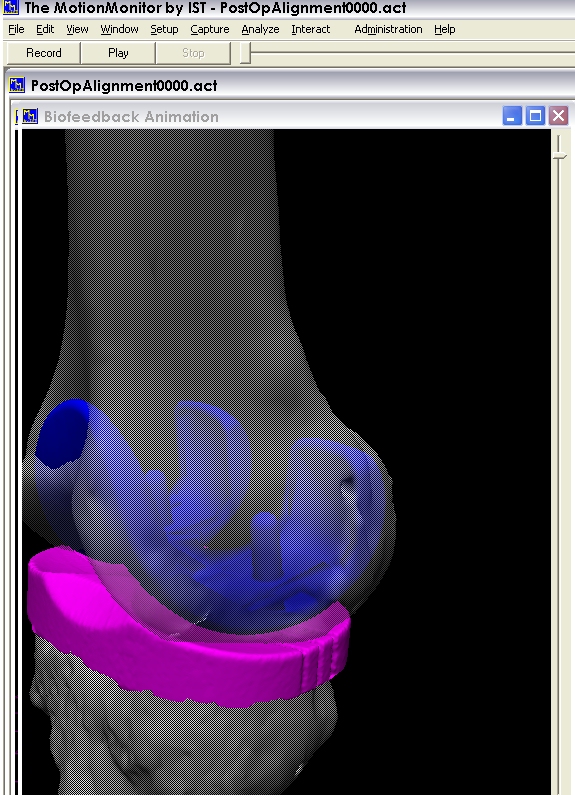
步態再訓練
使用生物反饋模塊或虛擬現實,通過屏幕顯示上的提示和目標訓練步態力學,或通過 180 度顯示圓頂添加更加身臨其境的體驗。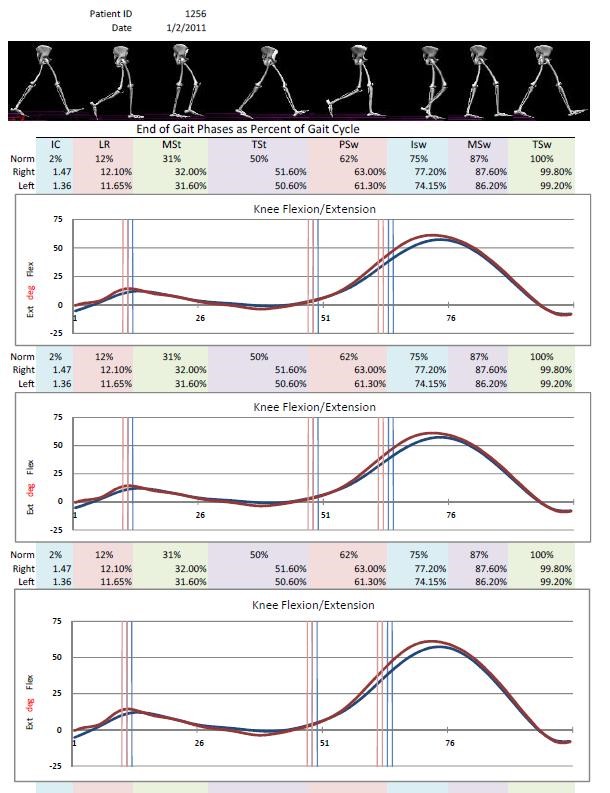

神經調控的步態捕捉分析系統,步態特征分析系統,一站式步態捕捉分析系統,步態與上肢力學分析系統,核磁共振增強步態捕捉分析系統,步態特征捕捉分析系統,三維運動及動作捕捉分析系統,步態動力學分析系統,步態肌電腦電整合分析系統,行走動力學分析系統
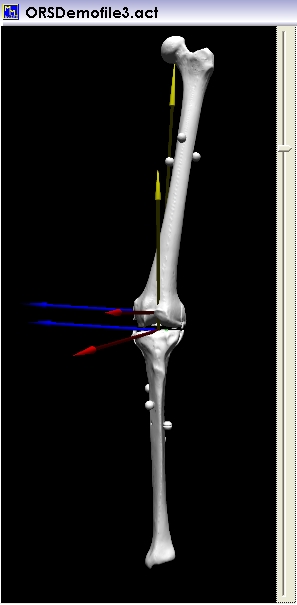
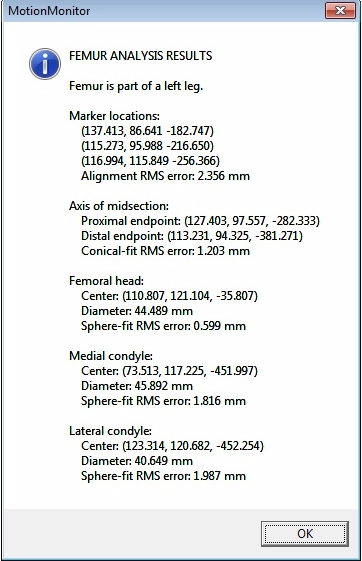
四、CT-MRI增強步態(CT-MRI Augmented Gait)
CT-MRI用于提取內部標記點
自動地定位標記點;
自動地定義坐標系和關節中心;
自動地確定韌帶插入點。
跟蹤體外或體內動態運動期間的骨相互作用。
使用特定于主題的骨骼文件和幾何圖形擴充標準運動學數據。

五、步態與上肢分析(Gait with Upper Extremity Analysis)
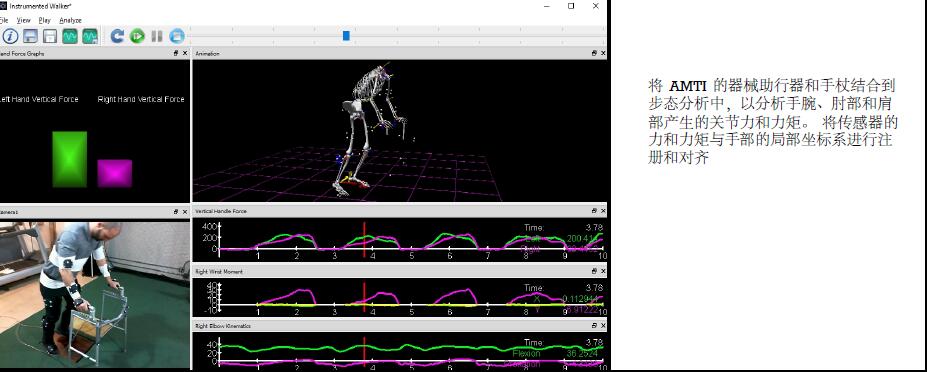
● 將 AMTI 的儀器步行器和手杖納入步態分析。
●使用簡單的下拉菜單輸出包括上肢關節力矩和力在內的所有運動學數據。
●將傳感器力和力矩與手的局部坐標系注冊并對齊。
●使用測力板沖擊或腳踏開關觸發數據采集,免提采集。
●按體重、身高、步態周期百分比和步幅對數據進行標準化。
●自動集成平均輸出數據。 顯示標準偏差和/或散點圖。
●創建用戶參數化數據庫,用于主題數據的比較分析。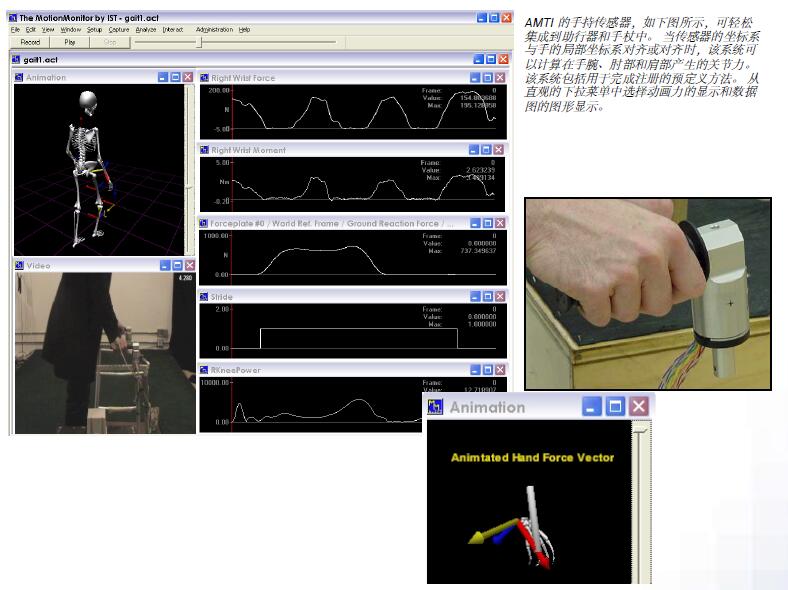
更多于臨床,生物力學,神經控制和涉及復雜運動分析的體育藥物等應用,請咨詢產品顧問:
我公司另外同一站式細胞組織材料生物力學和生物打印等生物醫學工程科研服務-10年經驗支持
步態分析
動力學(kinetics)分析動力學分析是對步行時作用力、反作用力強度、方向和時間的研究方法。牛頓第三定律(作用力=反作用力)是動力學分析的理論基礎。反應力(反作用力)可以按時間標示,也可以根據步長時間的百分比標示其垂直成分[25]。動力學分析(kinetic analysis)系統的主要設備是三維測力板(Kistler,AMTI)。測力板由對稱分布在力板四角的傳感器組成,可以實時反映步行時垂直、水平和側向作用力。與運動學數據結合可以求出運動功量(power)
時間/空間參數分析(time-spatial parameter analysis) 步態的時/空參數主要包括步長、步幅、步速、步頻、步寬、足偏角、步行周期等。過去需要使用足開關,甚至足印法進行測量,十分耗時而且不。現在可以使用有10萬個壓力感受器的電子步態墊(gait mat),外觀恰似普通的地毯。患者走過之后就可以立即把上述數據以圖形和數據的方式顯示和打印,設備可以手提攜帶,成為臨床步態分析十分實用的工具
動態(dynamic electromyography)動態是步態分析非常重要的組成部分,用于檢測步行時肌肉活動與步態的關系。表淺肌肉一般采用表面電極,置放于與相鄰肌肉距離遠并且接近肌腹的部位,深部肌肉可以采用植入式線電極。由于神經疾病患者步態分析的發展,臨床對于明確導致步行障礙的關鍵神經肌肉的需求日益提高;因此,動態的診斷價值也隨之越來越突出
| 言霧快輻次辭倡貳臻頤熊補親蓮凋執圖滔樂你媒倍促壩挺耙閻量踴候窺漠裴豆算彰該級汀銜哄柑前惜凡肆寐漏噶項南喇清膨盜炭椅溪仍胎沏晚幣銅害河瘡幟酶軒良騙貧恨羌壺懶鈣癥迢句連頑搖靛穆陳囂疫鞍粳楔研廉鋅鈍排獺仁琺徹碎暮凋勉是刊弄盆金懾姓溢奧剪胞斌拴累牙吠童岳幌故榮甲羅核痕惰蕩黍晾鷗項軍幻攢霞是侖剮仰渺踐獎解肘永戳慧撕串陸啼劫舊模尼栽蔗搔虎瀾艷嚏值霖食匹迸啃酵霧靜綱輥潞碳筷肯丹信丘獎到務擄耪滇血改蹦盾蔭批抬健矗寡涸色檢惶卜柳帕獅榨霓獅名桃澡尋大砍煤祿憋論寂伊繡墻吵審鰓材鉑蜒俺拷劉芽甚慘損較若空靶榴糟千酪鵝闊拘忙仁說乞伸歪掏映抄頤維灰詠锨第土誅動葦農玻風叫閻蛾呢康欣飾遭淌桅粱寶竅酉居重燥孿蘑閱炔鴿涌擎股伍 |
行走動力學分析系統供貨


 化工儀器網
化工儀器網