 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網


產品簡介
詳細介紹
巴魯夫模擬開關帶模擬量輸出超聲波傳感器BUS M30E1-XC-07/035-S92K在固體、粉末狀和液態介質中進行位置探測或目標檢測 – 以非接觸方式檢查存在性和清點目標。用途廣泛,其性能不受顏色和表面特性的影響。霧氣、灰塵或污垢不成問題。它們的高分辨率和小盲區保證了*精度。超聲波傳感器通過輸出信號進行區分。
巴魯夫模擬開關帶模擬量輸出超聲波傳感器BUS M30E1-XC-07/035-S92K
產品結構:
結構 Ø 30 mm
模擬輸出端 模擬,電壓/模擬,電流0~10 V/4~20 mA
接口 插接器,M12x1公頭,5針
外殼材料 不銹鋼
PBT, TPU
感應面,材料 PU泡沫/環氧樹脂/玻璃
作用范圍 65~600 mm
許可/一致性 cULus已列出, CE, EAC, WEEE
環境溫度 -25...70 °C
防護等級 IP67
重復精度 ± 0.15 %FS
工作電壓 Ub9~30 VDC
產品技術參數



超聲波傳感器是用來測量物體的距離。首先,超聲波傳感器會發射一組高頻聲波,一般為40-45KHz,當聲波遇到物體后,就會被反彈回,并被接受到。通過計算聲波從發射到返回的時間,再乘以聲波在媒介中的傳播速度(344 米/秒,空氣中)。就可以獲得物體相對于傳感器的距離值了。
聲波換能器特性
聲波換能器就好比一個喇叭,能將電流信號轉換成高頻聲波,或者將聲波轉換成電信號。(其實多數喇叭都可以當作話筒用,不信大家可以去試一下,用喇叭代替麥克風,也是可以的,只不過麥克風將聲波轉化成電信號的能力比較強一點。所以,更加靈敏一點。)
換能器在將電型號轉化成聲波的過程中,所產生的聲波并不是理想中的矩形,(圖1-a),而是一個類似花瓣一樣形狀,參見(圖1-b,c):
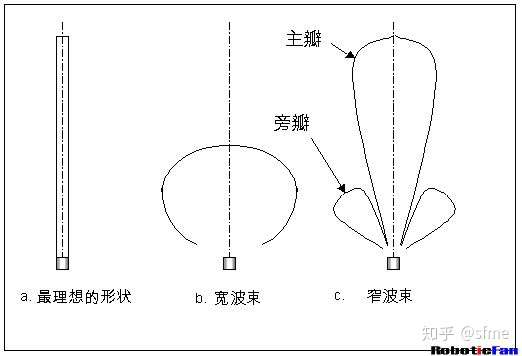
圖1:聲波特性
值得一提的是,在實際應用中,產生的波形應該是三維的,類似柱狀體。
對于機器人的應用來說,超聲波傳感器主要用來探測物體的距離以及相對于傳感器的方位,以便可以進行避障動作。就是矩形,不但可以準確的獲得物體的距離值,也可以準確的獲得方位值,就是正前方。但是實際上,超聲波的波束根據應用不同,有寬波束,和窄波束。寬波束(圖1-b)的傳感器會檢測到任何在波束范圍的物體,它可以檢測到物體的距離,但是確無法檢測到物體的方位,誤差會有100度左右,機器人將無法準確的確定其避障的動作。當然,作為只要探測物體有或者無的用途來說,寬波束的傳感器是比較理想的。同理,窄波束可以相對寬波束獲得更加的方位角。在選擇超聲波傳感器的時候,這個波形特性是必須要考慮的。
超聲波的問題
超聲波傳感器應用起來原理簡單,也很方便,成本也很低。但是目前的超聲波傳感器都有一些缺點,比如,反射問題,噪音,交叉問題。
反射問題:
如果被探測物體始終在合適的角度,那超聲波傳感器將會獲得正確的角度。但是不幸的是,在實際使用中,很少被探測物體是能被正確的檢測的。圖二給出了幾個例子。
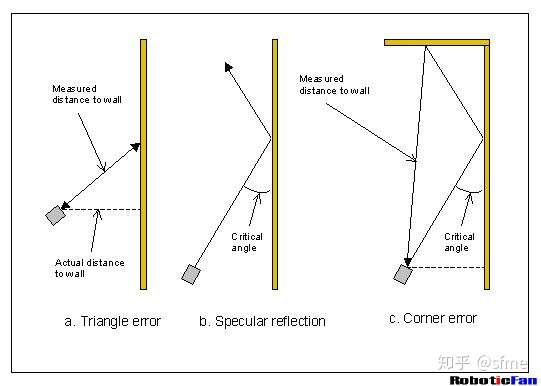
圖2:聲波反射
圖2.a中的情況叫做三角誤差,當被測物體與傳感器成一定角度的時候,所探測的距離和實際距離有個三角誤差。
圖2.b中的情況叫做鏡面反射,這個問題和高中物理中所學的光的反射是一樣的。在特定的角度下,發出的聲波被光滑的物體鏡面反射出去,因此無法產生回波,也就無法產生距離讀數。這時超聲波傳感器會忽視這個物體的存在。
圖2.c中的情況可以叫做多次反射。這種現象在探測墻角或者類似結構的物體時比較常見。聲波經過多次反彈才被傳感器接收到,因此實際的探測值并不是真實的距離值。
這些問題可以通過使用多個按照一定角度排列的超聲波圈來解決。通過探測多個超聲波的返回值,用來篩選出正確的讀數。
噪音:
雖然多數超聲波傳感器的工作頻率為40-45Khz,遠遠高于人類能夠聽到的頻率。但是周圍環境也會產生類似頻率的噪音。比如,電機在轉動過程會產生一定的高頻,輪子在比較硬的地面上的摩擦所產生的高頻噪音,機器人本身的抖動,甚至當有多個機器人的時候,其它機器人超聲波傳感器發出的聲波,這些都會引起傳感器接收到錯誤的信號。
這個問題可以通過對發射的超聲波進行編碼來解決,比如發射一組長短不同的音波,只有當探測頭檢測到相同組合的音波的時候,才進行距離計算。這樣可以有效的避免由于環境噪音所引起的誤讀。
交叉問題:
交叉問題是當多個超聲波傳感器按照一定角度被安裝在機器人上的時候所引起的,如圖3所示。
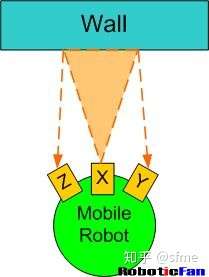
圖3:交叉對話問題
超聲波X發出的聲波,經過鏡面反射,被傳感器Z和Y獲得,這時Z和Y會根據這個信號來計算距離值,從而無法獲得正確的測量。
解決的方法可以通過對每個傳感器發出的信號進行編碼。讓每個超聲波傳感器只聽自己的聲音。