 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)








| 產(chǎn)地類別 | 國(guó)產(chǎn) | 應(yīng)用領(lǐng)域 | 電子 |
|---|
產(chǎn)品簡(jiǎn)介
詳細(xì)介紹
VSWL-JT01智能交通管理實(shí)訓(xùn)系統(tǒng)
一、簡(jiǎn)介
VSWL-JT01智能交通管理實(shí)訓(xùn)系統(tǒng)以城市道路交通為原型,綜合運(yùn)用傳感器采集、設(shè)備控制、無(wú)線傳感器網(wǎng)絡(luò)、射頻識(shí)別、圖像識(shí)別、嵌入式系統(tǒng)、無(wú)線通信等物聯(lián)網(wǎng)技術(shù)以及多學(xué)科技術(shù)的交叉融合,依托部署在交通沙盤(pán)中的智能小車、傳感器節(jié)點(diǎn)、控制節(jié)點(diǎn)、工業(yè)攝像機(jī)、智能網(wǎng)關(guān)、服務(wù)器與客戶端實(shí)現(xiàn)交通燈智能管理、路燈管理、公交優(yōu)先、超速抓拍、車牌識(shí)別、智能停車場(chǎng)、高速ETC、公路災(zāi)害智能預(yù)警、自動(dòng)避障、車聯(lián)網(wǎng)等功能,為解決現(xiàn)代城市交通擁堵、交通事故、違規(guī)逃逸、停車難等一系列問(wèn)題提供了技術(shù)路線,也為物聯(lián)網(wǎng)專業(yè)教學(xué)提供了一個(gè)完備的應(yīng)用實(shí)訓(xùn)系統(tǒng)。
二、系統(tǒng)構(gòu)成
智能交通主題沙盤(pán)實(shí)訓(xùn)系統(tǒng),利用各種傳感器測(cè)量城市道路中的參數(shù),結(jié)合嵌入式數(shù)據(jù)庫(kù)存儲(chǔ)技術(shù)將采樣數(shù)據(jù)統(tǒng)一保存管理;利用ZigBee無(wú)線傳感器網(wǎng)絡(luò)統(tǒng)一管理各個(gè)節(jié)點(diǎn);利用射頻技術(shù)實(shí)現(xiàn)車輛的自動(dòng)識(shí)別;利用圖像識(shí)別技術(shù)實(shí)現(xiàn)車牌識(shí)別;利用自動(dòng)控制理論和反饋控制理論實(shí)現(xiàn)智能控制;利用嵌入式Linux系統(tǒng)實(shí)現(xiàn)智能網(wǎng)關(guān)城市交通管理軟件;利用WIFI網(wǎng)絡(luò)實(shí)現(xiàn)網(wǎng)關(guān)與服務(wù)器之間的通信,激發(fā)用戶了解物聯(lián)網(wǎng)技術(shù)在城市交通網(wǎng)等現(xiàn)實(shí)環(huán)境的應(yīng)用。
1、系統(tǒng)外觀
沙盤(pán)實(shí)訓(xùn)系統(tǒng)外觀如圖所示。



智能交通沙盤(pán)外觀圖
2、系統(tǒng)構(gòu)成拓?fù)鋱D

系統(tǒng)構(gòu)成拓?fù)鋱D
三、硬件組成
主要由感知設(shè)備、控制設(shè)備、射頻識(shí)別裝置、圖像采集設(shè)備、智能小車、智能網(wǎng)關(guān)、監(jiān)控中心、供電設(shè)備、鋁合金鋼架模型等組成。
感知設(shè)備:
主要由傳感器調(diào)理板、ZigBee通信處理板以及接口底板組成的節(jié)點(diǎn)。標(biāo)配傳感器包括光線傳感器、車位狀態(tài)檢測(cè)傳感器、火焰?zhèn)鞲衅鞯龋筛鶕?jù)客戶需求定制不同類型的傳感器節(jié)點(diǎn)。它們通過(guò)ZigBee技術(shù)將采樣數(shù)據(jù)傳輸給智能網(wǎng)關(guān)。
控制設(shè)備:
主要由執(zhí)行設(shè)備、ZigBee通信處理板以及接口底板組成的節(jié)點(diǎn),因供電電流不同存在兩種類型的控制設(shè)備:直流供電型控制設(shè)備、交流供電型控制設(shè)備。直流供電設(shè)備主要包括車位狀態(tài)指示燈、十字路交通燈、道閘控制器、語(yǔ)音播放器、以及站臺(tái)LCD顯示器。交流供電控制設(shè)備主要包括控制器和交流電器,控制器封裝在標(biāo)準(zhǔn)的86盒內(nèi),交流電器只需插入86盒的兩相或三相插座內(nèi)即可實(shí)現(xiàn)電器的開(kāi)關(guān)控制,如路燈。
射頻識(shí)別裝置:
主要由超高頻讀寫(xiě)器、天線、以及超高頻標(biāo)簽組成,主要用來(lái)實(shí)現(xiàn)車輛不停車識(shí)別,可通過(guò)改變天線射頻功率實(shí)現(xiàn)讀寫(xiě)距離遠(yuǎn)近的調(diào)節(jié)。超高頻讀寫(xiě)器具有RJ45以太網(wǎng)接口,與智能網(wǎng)關(guān)處于同一個(gè)局域網(wǎng)內(nèi),通過(guò)TCP/IP協(xié)議與智能網(wǎng)關(guān)交互信息。
圖像采集設(shè)備:
主要包括模擬攝像頭和IP攝像頭兩種。AV模擬攝像頭安裝在城市交通重要路段,如十字路口、高速路入口、車場(chǎng)出入口等,用于違規(guī)抓拍和統(tǒng)計(jì)車流量。IP攝像頭是一種視頻服務(wù)器,主要用于重點(diǎn)場(chǎng)所的視頻監(jiān)控。
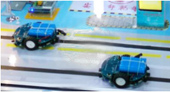
智能小車:
由核心控制板、ZigBee通信模塊、傳感器采集板、伺服電機(jī)、供電板、輪式底盤(pán)組成,實(shí)現(xiàn)自動(dòng)循跡、避障、紅燈擇路行駛、前進(jìn)、后退、左右轉(zhuǎn)彎、到站停車、以及與智能網(wǎng)關(guān)的通信等功能。
智能網(wǎng)關(guān):
主要用于傳感層設(shè)備的數(shù)據(jù)處理以及接入上層云服務(wù)平臺(tái)。主要由Cortex-A8主板組成,可升級(jí)為A9四核主板,整體封裝在模具內(nèi),美觀大方。主板集成ZigBee無(wú)線路由器通信模塊,用于維護(hù)ZigBee網(wǎng)絡(luò),接收Z(yǔ)igBee傳感器采樣信息,向ZigBee控制設(shè)備發(fā)送控制命令。主板還集成WiFi模塊,用于連接無(wú)線路由器,降低以太網(wǎng)布線的復(fù)雜度。同時(shí),主板可擴(kuò)展GPRS、3G或4G模塊,將智能網(wǎng)關(guān)接入互聯(lián)網(wǎng),實(shí)現(xiàn)信息的遠(yuǎn)程可靠傳輸。
監(jiān)控中心:
普通PC機(jī),通過(guò)TCP、UDP協(xié)議與智能網(wǎng)關(guān)通信,運(yùn)行智能交通管理軟件。
供電設(shè)備:
配有完善的供電設(shè)備,包括空氣開(kāi)關(guān)、急停開(kāi)關(guān)、電源指示燈等,安裝在底座鋼架上,為系統(tǒng)輸入安全穩(wěn)定的交流220V總電源。
鋼架模型:
支撐智能交通的整個(gè)設(shè)施,內(nèi)部鋪設(shè)供電線路。除了提供標(biāo)準(zhǔn)智能交通模型外,還可根據(jù)學(xué)校的要求設(shè)計(jì)智能交通的外觀,交通線路的規(guī)劃,感知與控制設(shè)備的類型,設(shè)備部署的方式等。
四、軟件資源
系統(tǒng)軟件默認(rèn)采用C/S結(jié)構(gòu),主要包括智能小車傳感器采集控制軟件、ZigBee無(wú)線傳感器網(wǎng)絡(luò)數(shù)據(jù)透明傳輸軟件、智能網(wǎng)關(guān)QT智能交通管理軟件、監(jiān)控終端C#智能交通管理軟件等。
智能小車自動(dòng)巡航系統(tǒng)軟件:
主要利用STC系列51單片機(jī)的接口總線,驅(qū)動(dòng)紅外反射、超聲波等傳感器采集信息,經(jīng)過(guò)處理,驅(qū)動(dòng)直流伺服電機(jī)帶動(dòng)萬(wàn)向輪轉(zhuǎn)動(dòng),實(shí)現(xiàn)小車的自動(dòng)循跡、避障、行駛方式的改變等功能。同時(shí)小車上的閱讀器和天線會(huì)自動(dòng)識(shí)別道路上鋪設(shè)的射頻卡,實(shí)現(xiàn)小車地圖定位。
ZigBee無(wú)線傳感器網(wǎng)絡(luò)數(shù)據(jù)透明傳輸軟件:
主要實(shí)現(xiàn)ZigBee網(wǎng)絡(luò)的建立、節(jié)點(diǎn)的自動(dòng)入網(wǎng)、節(jié)點(diǎn)休眠與喚醒、節(jié)點(diǎn)之間數(shù)據(jù)的透明傳輸、傳感器節(jié)點(diǎn)的采樣與傳輸、以及執(zhí)行節(jié)點(diǎn)驅(qū)動(dòng)設(shè)備的功能。
智能網(wǎng)關(guān)QT智能交通管理軟件:
智能網(wǎng)關(guān)采用嵌入式Linux操作系統(tǒng),上電后即運(yùn)行基于QT的智能交通管理軟件。軟件包括系統(tǒng)設(shè)置、交通管理主界面等。用戶可以在本地網(wǎng)關(guān)上直接瀏覽智能小車的運(yùn)行狀態(tài),控制小車的運(yùn)行方式,瀏覽關(guān)鍵路口(高速出入口或停車場(chǎng)出入口)的抓拍圖像,也可手動(dòng)控制出入口閘機(jī)。軟件系統(tǒng)集成了嵌入式數(shù)據(jù)庫(kù),對(duì)所有傳感器數(shù)據(jù)進(jìn)行保存。
監(jiān)控終端C#智能交通管理軟件:
監(jiān)控中心運(yùn)行基于C#的智能交通管理軟件,主要實(shí)現(xiàn)城市公交與私家車在城市交通圖中的定位等功能。
五、系統(tǒng)功能
| 多車同時(shí)行駛 |
| 公交優(yōu)先功能 |
| 交通燈管理 |
| 路燈管理 |
| 圖像抓拍 |
| ETC不停車收費(fèi)系統(tǒng) |
| 災(zāi)害預(yù)警系統(tǒng) |
| 車聯(lián)網(wǎng)系統(tǒng) |
| 車位的智能管理 |
| 用戶預(yù)定車位 |








六、教學(xué)資源
系統(tǒng)覆蓋了智能車采集控制、ZigBee無(wú)線傳感器網(wǎng)絡(luò)、Linux智能網(wǎng)關(guān)、以及PC機(jī)監(jiān)控終端三部分,因此系統(tǒng)提供了約三十個(gè)課時(shí)的實(shí)驗(yàn),從基礎(chǔ)采集傳輸實(shí)驗(yàn),到網(wǎng)關(guān)匯聚分析處理實(shí)驗(yàn),再到PC機(jī)監(jiān)控終端應(yīng)用實(shí)驗(yàn),一條線貫穿,讓學(xué)生在實(shí)驗(yàn)中逐步領(lǐng)悟物聯(lián)網(wǎng)的體系結(jié)構(gòu),關(guān)鍵技術(shù)以及實(shí)現(xiàn)方式,培養(yǎng)學(xué)生動(dòng)手解決問(wèn)題的能力,激發(fā)學(xué)生的創(chuàng)新潛力。
另外,為方便用戶教學(xué)和學(xué)習(xí),系統(tǒng)提供了一本使用手冊(cè)和一本實(shí)驗(yàn)指導(dǎo)書(shū)。使用手冊(cè)主要介紹如何安全正確地操作這套系統(tǒng),使其正常運(yùn)轉(zhuǎn),實(shí)現(xiàn)智能交通的各項(xiàng)功能。實(shí)驗(yàn)指導(dǎo)書(shū)詳細(xì)地介紹了系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu),網(wǎng)絡(luò)參數(shù),實(shí)驗(yàn)?zāi)康模瑢?shí)驗(yàn)原理,以及實(shí)驗(yàn)步驟等。
1、基礎(chǔ)實(shí)驗(yàn)?zāi)芰?/span>
名稱 | 實(shí)驗(yàn) |
1.智能小車采集控制實(shí)驗(yàn) | Keil uvision開(kāi)發(fā)環(huán)境搭建實(shí)驗(yàn) |
1. 無(wú)線傳感器網(wǎng)絡(luò)通信類實(shí)驗(yàn) | IAR集成開(kāi)發(fā)環(huán)境搭建實(shí)驗(yàn) |
2. Linux智能網(wǎng)關(guān)實(shí)驗(yàn) | Qt開(kāi)發(fā)環(huán)境搭建實(shí)驗(yàn) |
3. PC機(jī)監(jiān)控終端實(shí)驗(yàn) | PC機(jī)與網(wǎng)關(guān)的TCP通信實(shí)驗(yàn) |
2、創(chuàng)新實(shí)驗(yàn)?zāi)芰?/span>
名稱 | 實(shí)驗(yàn) |
1. 基于QT的智能網(wǎng)關(guān)創(chuàng)新實(shí)驗(yàn) | 基于Qt的車聯(lián)網(wǎng)通信實(shí)驗(yàn) |
2. 基于C#的PC機(jī)監(jiān)控終端創(chuàng)新實(shí)驗(yàn) | 基于C#的車輛定位實(shí)驗(yàn) |
3、科研實(shí)驗(yàn)?zāi)芰?br />除了上述傳感控制設(shè)備、智能網(wǎng)關(guān)與智能終端的相關(guān)實(shí)驗(yàn)外,系統(tǒng)還提供了開(kāi)發(fā)類實(shí)驗(yàn)。
名稱 | 實(shí)驗(yàn) |
1.無(wú)線傳感器網(wǎng)絡(luò)開(kāi)發(fā)實(shí)驗(yàn) | 簡(jiǎn)單的無(wú)線收發(fā)實(shí)驗(yàn);誤碼率測(cè)試實(shí)驗(yàn);頻譜分析實(shí)驗(yàn); |
2.智能網(wǎng)關(guān)開(kāi)發(fā)實(shí)驗(yàn) | 嵌入式Linux開(kāi)發(fā)環(huán)境建立實(shí)驗(yàn): |