 化工儀器網
化工儀器網


詳細介紹
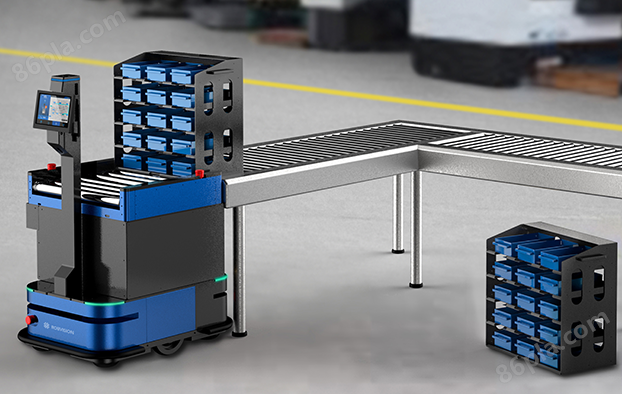
輥筒自動搬運機器人采用自主研發的室內視覺定位導航技術,基于環境自然特征建圖和定位,無需軌道和地標,可自主定位和規劃路徑。相比于激光雷達SLAM技術,藍芯科技自研的視覺定位導航技術充分利用室內應用環境中豐富的特征信息,實現更好的環境適應性和魯棒性,即使是在動態環境中,也能實現高精度定位。
? 輥筒類型:單向輥筒和雙向輥筒
? 對接類型:側方對接和尾部對接
? 負載:小于350kg
? 對接時間:小于15s
參數名 詳細參數
輥筒尺寸 離地低600mm
輥筒方向 單、雙向轉動
對接確認信號 紅外通信、WiFi通信
承載 ≤350kg
輥筒速度 ≤1m/s
在生產線上,輥筒自動搬運機器人可實現生產過程中的原材料、零配件、在制品、半成品、成品的收發、轉移和上下料。輥筒自動搬運機器人可有效提升生產柔性,助力企業實現智能化轉型,實現無人化生產。 在電商倉儲中,輥筒自動搬運機器人可以完成大宗貨物的轉移、進出庫、揀貨或補貨作業。通過多機調度系統,實現搬運機器人大 規模協同工作,以應對電商倉儲高頻次業務。
視覺導航
采用視覺定位,無需安裝反射板、磁條等, 無需改造客戶現場, 確保靈活性及擴展性。
多傳感器融合
以自主研發的視覺傳感器為主,輔以短距激光雷達、 IMU、超聲波、碰撞傳感器等, 為機器人提供精確的環境感知信息, 實現機器人自主定 位、自主決策、自動規劃路徑和靈活避障。
自適應懸掛
自主研發的自適應懸掛系統, 保證機器人在不平整地面上 平穩運行。
智能調度
通過智能調度系統,根據搬運任務, 對大規模作業的機器人進行任務調度 和行走路徑規劃,高效協同作業, 提升機器人整體作業效率。
狀態管理
通過多機調度系統, 可以觀測到所有運行中的搬運機器人 的狀態,包括其任務列表、運行狀 態,便于遠程管理。
 化工儀器網
化工儀器網