 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網

工業自動化之伺服系統行業綜述
一、伺服系統的定義
伺服來自英文單詞SERVO,指系統跟隨外部指令進行人們所期望的運動,運動要素包括位置、速度和力矩。
伺服系統是以變頻技術為基礎發展起來的產品,是一種以機械位置或角度作為控制對象的自動控制系統。伺服系統除了可以進行速度與轉矩控制外,還可以進行、快速、穩定的位置控制。
二、伺服系統的分類
按控制原理分,有開環、閉環和半閉環三種形式;按被控制量性質分,有位移、速度、力和力矩等伺服系統;按驅動方式分,有電氣、液壓和氣壓等伺服驅動形式;按執行元件分,有步進電機伺服、直流電機伺服和交流電機伺服形式。
三、伺服系統的發展歷程
50年代以前,伺服系統由傳統液壓控制向電氣控制轉變;
60年代,直流伺服電機得到廣泛應用,其控制電路比較簡單,價格較低,但缺點是內部有機械換向裝置,碳刷易磨損;
70年代,交流伺服控制系統和交流伺服電機逐步普及,取代直流電機成為伺服系統的主導執行電機;
80年代,伺服系統閉環系統逐步取代開環系統;
90年代以后,交流伺服系統由模擬控制向數字化控制進化。
四、伺服系統的構成
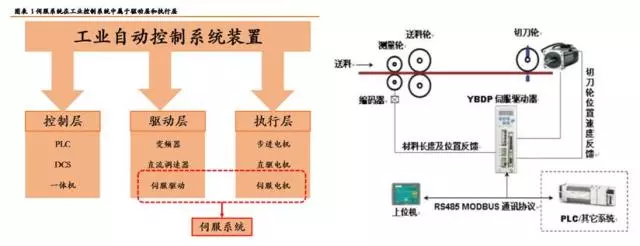
目前應用為廣泛的是電氣伺服系統,本文主要介紹電氣伺服系統,通常伺服系統包括伺服驅動器和伺服電機,以及伺服反饋裝置(編碼器)。
伺服驅動器屬于自動化控制系統中的驅動層,伺服電機屬于執行層,編碼器通常內置在伺服電機末端。
伺服驅動器,又被稱為伺服控制器、伺服放大器,是用來控制伺服電機的一種控制器。其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過位置、速度和力矩三種方式對伺服電機進行控制,實現高精度的傳動系統定位,是傳動技術的核心控制產品。
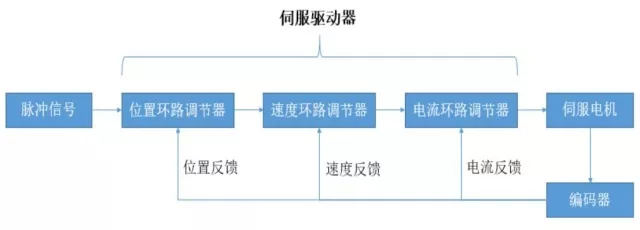
伺服驅動器可以通過速度環、位置環、電流環分別對伺服電機的轉速、位置、轉矩進行相應控制。
伺服電機,在自動化控制系統往往與終端執行機構相連,因此也被成為執行電機。伺服電機在伺服系統中作為執行元件,其作用是將伺服控制器的脈沖信號轉化為電機轉動的角位移和角速度。
伺服電機分為直流和交流伺服電動機兩大類,與普通電機相比其主要特點是,其通常搭配反饋裝置一起使用。
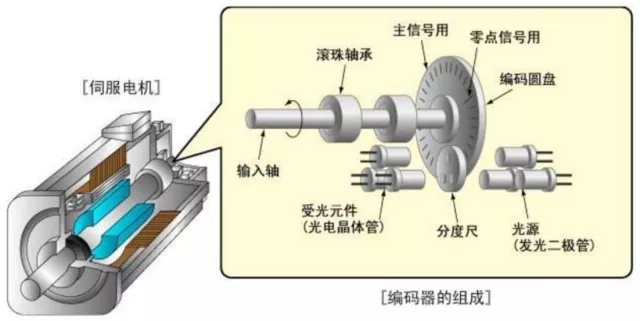
編碼器,也就是伺服電機的主要反饋裝置,安裝在伺服電機末端用來測量伺服電機轉角及轉速的一種傳感器。伺服電機的控制度很大程度決定于編碼器的精度。
目前自控領域常用的是光電編碼器和磁電編碼器。光電編碼器通過光電碼盤反射光信號數量確定電機轉子轉動角度,而磁電編碼器通過磁場感應元器件來感應電機轉子轉動所帶來的磁場變化來確定電機轉子位置。
五、伺服系統的工作方式
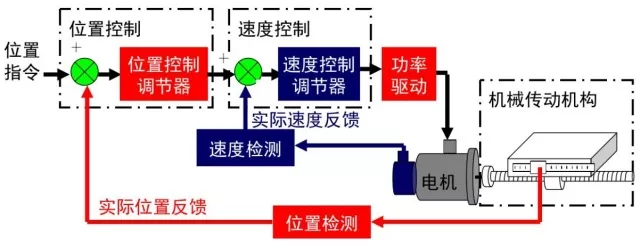
伺服系統的工作過程可以簡單理解為上位機(PLC、控制卡)發出脈沖信號驅動伺服電機,由上位機來控制整個伺服運動,編碼器是一個反饋單元,用來檢查伺服電機執行了多少脈沖信號并反饋給驅動器,從而進行閉環控制。
簡單來說,伺服驅動器驅動電機運轉,電機帶著編碼器旋轉,編碼器的反饋型號輸送到控制器,控制器就能知道電機的運轉情況,從而得出電機的轉速,移動位置和移動距離等。控制器根據編碼器反饋的信號經過計算得出偏差結果,再次控制電機運動,糾正偏差,從而控制電機的轉速、位置、距離和力矩等系統變量。
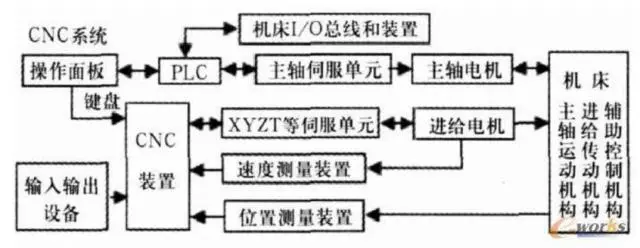
六、數控機床的伺服系統
數控機床的伺服系統是數控機床的重要組成部分。伺服系統位于數控裝置與機床主體之間,其主要功能是從數控裝置接收微小的電控信號,放大成強電信號,去驅動伺服系統中的驅動元件——伺服電動機,將電控信號的變化,轉換成伺服電動機輸出軸的角位移或角速度的變化,從而帶動機床各部件運動。
數控機床伺服系統是以機械位移為直接控制目標的自動控制系統,也可稱為位置隨動系統。
數控機床的CNC 裝置是數控機床發布命令的“大腦”,而伺服驅動則為數控機床的“四肢”,是一種 “執行機構”,它能夠地執行來自CNC 裝置的運動指令。
數控機床伺服系統主要有兩種:一種是進給伺服系統,它控制機床各坐標軸的切削進給運動,以直線運動為主;另一種是主軸伺服系統,它控制主軸的切削運動以旋轉運動為主。驅動裝置由驅動部件和速度控制單元組成。驅動部件由交流或直流電動機、位置檢測元件(例如旋轉變壓、感應同步器,光柵等)及相關的機械傳動和運動部件(滾珠絲杠副、齒輪副及工作臺等)組成。
七、伺服系統與變頻器
交流伺服的技術本身就是借鑒并應用了變頻的技術,在直流電機的伺服控制的基礎上通過變頻的PWM方式模仿直流電機的控制方式來實現的,交流伺服電機必然有變頻的這一環節。可以說,伺服系統是以變頻技術為基礎發展起來的產品。
變頻器是利用電力半導體器件的通斷作用將工頻電源變換成另一頻率的電能控制裝置,能實現對交流異步電機的軟啟動、變頻調速、提高運轉精度、改變功率因素等功能。可驅動變頻電機、普通交流電機,主要是充當調節電機轉速的角色。
伺服系統是使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標的任意變化的自動控制系統。主要任務是按控制命令的要求、對功率進行放大、變換與調控等處理,使驅動裝置輸出的力矩、速度和位置控制的非常靈活方便。
目前,在工業應用上,速度控制和力矩控制的場合要求不是很高的一般用變頻器,在有嚴格位置控制要求的場合中只能用交流伺服驅動器來實現,有些對速度的精度和響應要求高的場合也有用交流伺服驅動器控制的。
八、伺服系統的市場分析
根據工控網數據,2016年伺服系統恢復業績增長,市場規模達到86億,增長率40%,受2008年金融危機以及2009年國內經濟刺激計劃影響,2011-2015年國內制造業固定資產投資持續不景氣,帶來伺服系統市場需求增長率持續下跌。2016年開始,國內制造業投資出現復蘇跡象,伺服系統也恢復快速增長。
根據《中國制造2025》規劃,傳統產業的升級,以及新興產業的高速發展,工業自動化趨勢下伺服系統需求將持續增長,按照政策規劃測算可以保持每年10%以上的增速,在 2020年達到百億級市場。