


 8
8
當(dāng)前位置:上海育仰科教設(shè)備有限公司>>公司動態(tài)>>PLC在機(jī)電一體化控制實(shí)訓(xùn)臺中的應(yīng)用

PLC在機(jī)電一體化控制實(shí)訓(xùn)臺中的應(yīng)用
一、引言
光機(jī)電氣一體化控制實(shí)訓(xùn)系統(tǒng),系統(tǒng)由型材導(dǎo)軌式實(shí)訓(xùn)臺;PLC模塊(FX2N-48MT晶體管輸出);變頻器(FR-E740三相輸入功率0.75kW)模塊;電源模塊1個(三相電源總開關(guān)帶漏電和短路保護(hù));按鈕模塊(開關(guān)電源24V/6A 1只,急停按鈕1只);觸摸屏;模擬生產(chǎn)設(shè)備實(shí)訓(xùn)模塊(包含上料機(jī)構(gòu)井式工件庫1件,物料推出機(jī)構(gòu)1件,光電傳感器2只,磁性開關(guān)2只,單桿氣缸1只,單控電磁閥1只,警示燈1只;皮帶輸送線(三相交流減速電機(jī)AC 380V,輸出轉(zhuǎn)速130r/min);搬運(yùn)機(jī)械手(單桿氣缸1只、雙桿氣缸1只、氣動手爪1只、電感傳感器1只、磁性開關(guān)5只、行程開關(guān)2只、步進(jìn)電機(jī)1只、步進(jìn)驅(qū)動器1只、單控電磁閥2只、雙控電磁閥1只);分類倉儲物料有金屬(鋁)4個,尼龍黑、白色各4個);接線端子排、各種傳感器、警示燈和氣動電磁閥等組成;可根據(jù)任務(wù)書中要求完成程序設(shè)計(jì)調(diào)試及相應(yīng)的動作要求。
二、摘錄任務(wù)書中難點(diǎn)部分要求
設(shè)備部件名稱和位置如圖1所示。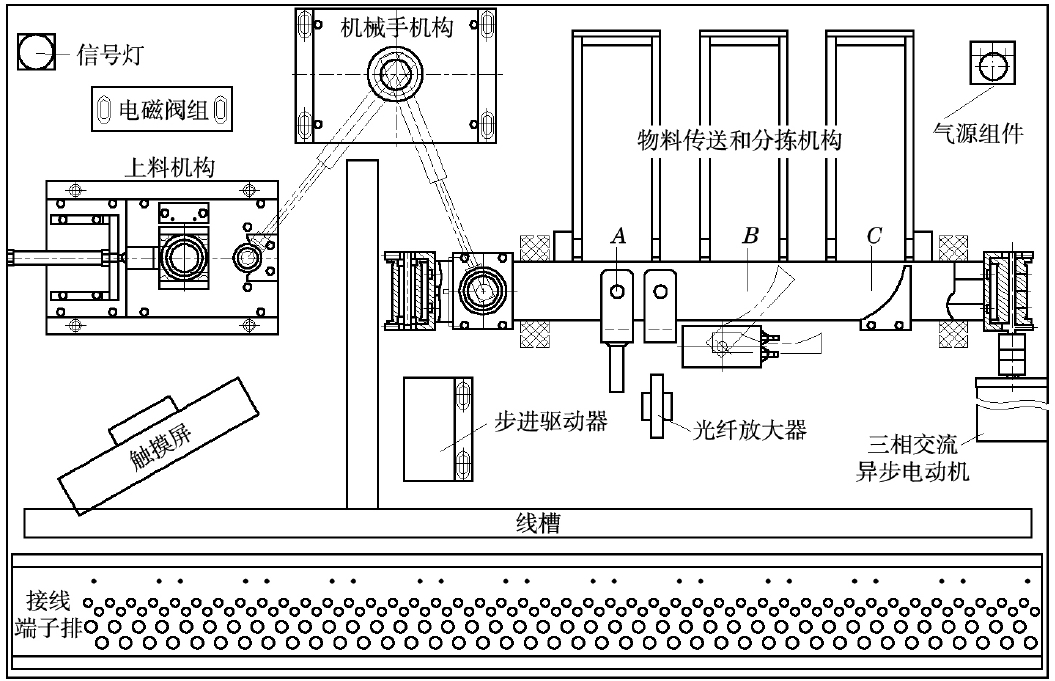
圖1 設(shè)備部件名稱和位置
1.動作流程
上料機(jī)構(gòu)推料氣缸將零件(金屬零件、黑色尼龍零件和白色尼龍零件隨機(jī)提供)推到存放料臺;機(jī)械手將零件從存放料臺搬運(yùn)至物料傳送機(jī)構(gòu)并經(jīng)傳送帶入料口到輸送線上,只有當(dāng)傳送帶上的零件被送入料槽后,機(jī)械手才可以從入料口放入下一個零件。上料機(jī)構(gòu)料筒內(nèi)沒有零件時,黃色信號燈長亮,設(shè)備暫停,放入零件后自動啟動。
在輸送線上的零件由相應(yīng)位置的推料或?qū)Я涎b置,經(jīng)出料槽分送到零件組裝機(jī)構(gòu)進(jìn)行組裝,相應(yīng)位置的推料或?qū)Я涎b置將零件送入料槽后回原位。
2.零件分送要求
在位置A對應(yīng)的出料槽分送到組裝機(jī)構(gòu)的零件必須滿足是由*個是金屬零件,第二個白色尼龍零件,第三個是金屬零件排列成的套件。在位置B對應(yīng)的出料槽分送到組裝機(jī)構(gòu)的零件必須滿足是由1個白色尼龍零件和2個黑色尼龍零件組合成的套件。同時滿足位置A對應(yīng)的出料槽和位置B對應(yīng)的出料槽要求的零件,應(yīng)優(yōu)先經(jīng)位置A對應(yīng)的出料槽分送到組裝機(jī)構(gòu)。
不滿足組合和排列關(guān)系的零件應(yīng)導(dǎo)入位置C對應(yīng)的出料槽。皮帶輸送線由位置A向位置C方向送零件時,三相交流異步電動機(jī)以35Hz的頻率帶動皮帶輸送機(jī)運(yùn)行;皮帶輸送機(jī)由位置C向位置A方向送零件時,三相交流異步電動機(jī)以25Hz的頻率帶動皮帶輸送機(jī)運(yùn)行。零件到達(dá)推出位置或被導(dǎo)入相應(yīng)的料槽后,皮帶輸送機(jī)停止運(yùn)行。依據(jù)動作流程分配的PLC對應(yīng)I/O口見表1。
| 序號 | 內(nèi)容 | 輸入 | 內(nèi)容 | 輸出 |
| 1 | 急停開關(guān) | X000 | 機(jī)械手步進(jìn)電機(jī)啟動(PUL) | Y000 |
| 2 | 運(yùn)行測試按鈕SB4 | X001 | 機(jī)械手步進(jìn)電機(jī)方向(DIR) | Y001 |
| 3 | 送料氣缸推出到位 | X002 | 機(jī)械手步進(jìn)電機(jī)使能(ENA) | Y002 |
| 4 | 送料氣缸縮回到位 | X003 | Y003 | |
| 5 | 機(jī)械手步進(jìn)電機(jī)原點(diǎn) | X004 | 綠色信號燈1Hz | Y004 |
| 6 | 機(jī)械手步進(jìn)電機(jī)位置檢測 | X005 | 綠色信號燈2Hz | Y005 |
| 7 | 臂伸縮氣缸伸出到位 | X006 | 黃色信號燈常亮 | Y006 |
| 8 | 臂伸縮氣缸縮回到位 | X007 | 送料氣缸推出 | Y007 |
| 9 | 前臂升降氣缸下降到位 | X010 | 臂伸縮氣缸伸出 | Y010 |
| 10 | 前臂升降氣缸縮回到位 | X011 | 前臂升降氣缸下降 | Y011 |
| 11 | 氣動機(jī)械手爪夾緊到位 | X012 | 氣動手爪夾緊 | Y012 |
| 12 | 推料氣缸推出到位 | X013 | 氣動手爪放松 | Y013 |
| 13 | 推料氣缸縮回到位 | X014 | 電機(jī)正傳(A料槽向C料槽) | Y014 |
| 14 | 旋轉(zhuǎn)氣缸旋轉(zhuǎn)到位 | X015 | 電機(jī)反傳(C料槽向A料槽) | Y015 |
| 15 | 旋轉(zhuǎn)氣缸返回到位 | X016 | 異步電機(jī)旋轉(zhuǎn)頻率35Hz | Y016 |
| 16 | 料筒有料檢測 | X017 | 異步電機(jī)旋轉(zhuǎn)頻率35Hz | Y017 |
| 17 | 存放臺有料 | X020 | 推料氣缸推出 | Y020 |
| 18 | 輸送皮帶入料口有料 | X021 | 旋轉(zhuǎn)氣缸旋轉(zhuǎn) | Y021 |
| 19 | 金屬檢測傳感器 | X022 | ||
| 20 | 白色尼龍檢測傳感器 | X023 | ||
| 21 | 分料槽進(jìn)料檢測傳感器 | X024 | ||
| 22 | 零件組裝工序啟動按鈕SB1 | X025 | ||
| 23 | 啟動組裝工序按鈕SB5 | X026 | ||
| 24 | 停止按鈕SB6 | X027 |
3.程序設(shè)計(jì)思路
根據(jù)PLC編程規(guī)則對本動作流程采取簡單的順序設(shè)計(jì),分析動作要求轉(zhuǎn)化內(nèi)容為:上料機(jī)構(gòu)井式存料臺內(nèi)檢測開關(guān)檢測有料,且存放臺無料的情況下,送料氣缸推出;送料氣缸推出到
位檢測開關(guān)有信號停頓1s,送料氣缸縮回。存放臺物料到位后,機(jī)械手在原點(diǎn)信號到位,前臂升降氣缸縮回信號到位,臂伸縮氣缸縮回到位信號到位,機(jī)械手爪松開到位信號到位,臂伸縮氣缸伸出,前臂升降氣缸下降,待到位信號顯示正常,機(jī)械手進(jìn)行抓取,抓取到位信號到位。前臂升降氣缸縮回,臂伸縮氣缸縮回;前臂、伸縮氣缸縮回到位信號到位。步進(jìn)電機(jī)向右旋轉(zhuǎn)(步進(jìn)電機(jī)旋轉(zhuǎn)角度依靠步進(jìn)電機(jī)控制驅(qū)動器發(fā)出的脈沖數(shù)進(jìn)行控制),步進(jìn)電機(jī)旋轉(zhuǎn)到位信號到位,前臂、伸縮氣缸伸出、下降;檢測輸送皮帶入料口無料,機(jī)械手爪松開,前臂、伸縮氣缸縮回到位后,步進(jìn)電機(jī)回歸原點(diǎn),等待下次循環(huán)。
出料槽完成分選,首先要自動識別黑色尼龍、白色尼龍、金屬鋁塊3種物料,金屬鋁塊可用提供的金屬傳感器進(jìn)行檢測,白色尼龍依靠光纖傳感器進(jìn)行檢測,黑色尼龍只有靠排除法進(jìn)行確認(rèn),即從皮帶入料槽檢測有料輸送帶開始運(yùn)行到出料槽B的時間內(nèi),檢測不是金屬物料又不是白色物料即為黑色尼龍。這樣就可以依據(jù)內(nèi)部繼電器、計(jì)數(shù)器、計(jì)時器、通過電機(jī)的正反轉(zhuǎn)進(jìn)行控制,具體思路同上,考慮防止撞機(jī)等安全因素,完成上述要求的程序設(shè)計(jì),從整體程序內(nèi)摘錄部分程序(圖2)。
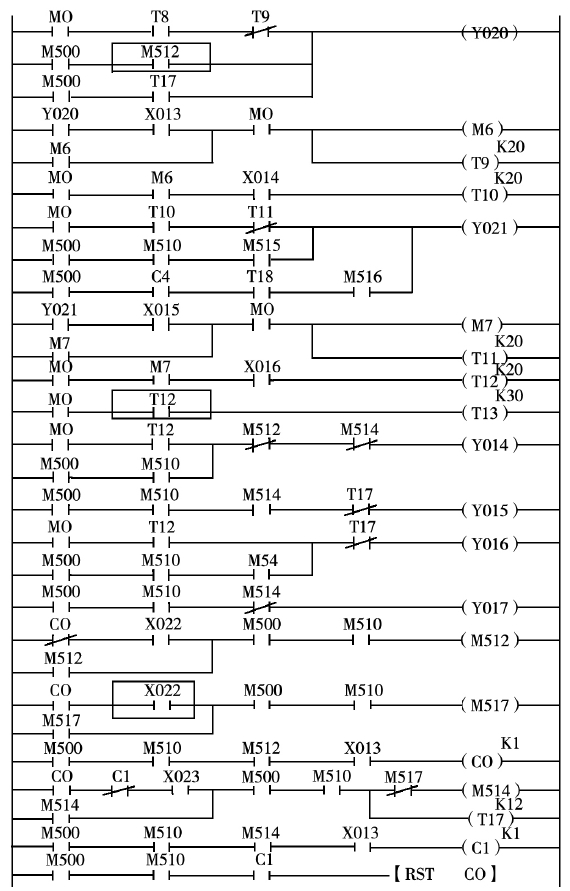
圖2 部分程序
三、結(jié)束語
根據(jù)實(shí)際動作要求,起初編寫的程序存在較多漏洞,經(jīng)過多次在實(shí)驗(yàn)臺上進(jìn)行測試,所設(shè)計(jì)程序*可實(shí)現(xiàn)任務(wù)書的要求并達(dá)到zui終實(shí)驗(yàn)要求。在編程調(diào)試程序時,實(shí)驗(yàn)臺中涉及到氣缸控制,在線調(diào)試方法的靈活運(yùn)用,步進(jìn)電機(jī)、光電傳感器、光纖傳感器、光纖放大器、三相異步電機(jī)、三菱變頻調(diào)速器、三菱PLC主機(jī)的應(yīng)用,代表了自動化設(shè)備的生產(chǎn)模式,可推廣至各個領(lǐng)域,特別是自動化生產(chǎn)線,在量產(chǎn)的今天不但可節(jié)省用工成本,而且可提高設(shè)備利用率,創(chuàng)造更*。