從自然界中發現雙翼的靈感
飛行是人類古老的夢想之一。一直以來,我們執著于觀察動物世界中的構造。在仿生學習網絡項目中,飛行同樣是一個高頻話題。多年以來,費斯托與高校、研究機構和研發企業合作,借鑒自然界的基本科學原理,打造了眾多研究載體。
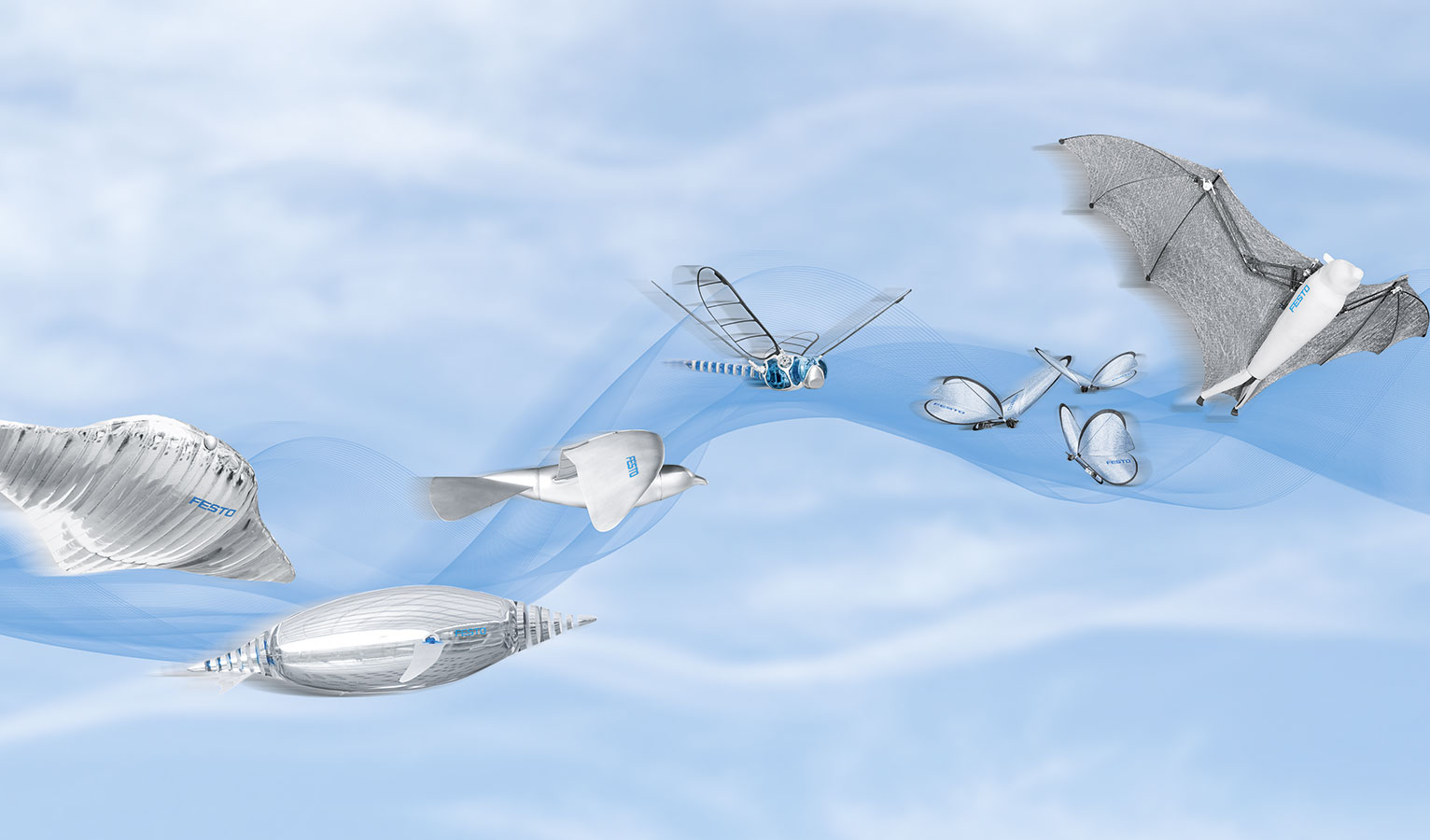
仿生學家們先是注意到了蝠鲼的胸鰭。蝠鲼雖生活在水中,但當它游動時,胸鰭卻如同翅膀一般上下拍打。2007年,我們將這一原理應用于Air_ray 中。憑借Fin Ray Effect®輕巧的設計,氦氣的浮力與拍打翅膀產生的驅動力,Air_ray能如同蝠鲼在水中游動一樣在空氣中移動。在仿生學理念的引導下,AirPengiuns 于2009年問世。AirPenguins的飛行技術與企鵝的游泳技術十分接近,通過被動扭轉翅膀可產生正向與反向推動力
從水下延伸到天空
在此基礎上,我們已經于2011年破解鳥類飛行的秘密,并推出SmartBird. 該仿生設計受銀鷗生物體構造的啟發,可自主完成啟動、飛行與降落,無需外界驅動;其翅膀不僅可以上下拍打,還能向既定方向扭轉。該設計中有一個活動的關節扭轉驅動裝置,可通過一系列復雜原理實現的驅動。
BionicOpter蜻蜓的飛行技巧
如果觀察蜻蜓的世界,就會發現一種更復雜的飛行方式。蜻蜓的飛行技巧十分*:它們可延任意軌跡靈活飛行,可停留在空中,也可張開雙翼滑翔。蜻蜓的兩對翅膀活動時互不影響,使其可以突然停止或轉向,在短時間內加速,甚至是向后飛行。通過BionicOpter, 費斯托生物團隊于2013年在一架超輕型飛行物中對這些極其復雜的生物特性予以轉化,將直升機、引擎飛機和滑翔機這三種飛機的飛行方式匯聚于一個機型。通過調節四個機翼各自的震動頻率和轉動角度可控制飛行的方向和力度,遠程操控蜻蜓飛行器到達所在空間內的幾乎各個角落。
eMotionButterflies:集體飛行
2015年,費斯托通過eMotionButterflies完善了飛行器的輕量化和微型化。每只仿生蝴蝶的重量僅為32克。為使飛行器盡可能貼近自然樣板,eMotionButterflies采用一種高度集成的機載電子設備。該設備可且獨立地控制各個機翼,實現快速移動。空間中安裝的十臺攝像機識別仿生蝴蝶上的紅外線標記,再由攝像機將位置信息傳送至中央控制主機,從外部協調仿生蜻蜓的飛行。
 BionicFlyingFox:在飛行過程中,控制主機將人工仿生狐蝠與真實狐蝠的飛行軌跡進行對比,通過機器學習,不斷優化仿生狐蝠的飛行效果。
BionicFlyingFox:在飛行過程中,控制主機將人工仿生狐蝠與真實狐蝠的飛行軌跡進行對比,通過機器學習,不斷優化仿生狐蝠的飛行效果。
BionicFlyingFox:半自主飛行
仿生學家們進一步開發該智能網絡,于2018年漢諾威工業博覽會上展出了可半自主飛行的BionicFlyingFox。半自主飛行通過機載電子設備與外部攝像機系統的組合實現,可使人工仿生蝙蝠以2.28米的翼展從空中飛過。人工仿生蝙蝠全身采用一種特殊研制的彈性氣密材料,由彈性針織面料和選擇性焊接的金屬箔制成。蜂窩狀的構造使得BionicFlyingFox可以在輕微損壞的情況下繼續飛行。
大自然中生物的飛行方式各有千秋——要將這些技術投入到科技研發中,需要面臨輕量化與功能整合兩大挑戰。而BionicFlyingFox將所有高載荷運動學中的關節點置于同一平面內,以便整個機翼呈剪刀狀折疊。至此,費斯托成功解密了動物世界中的全部飛行方式。然而探索遠沒有結束。在大自然中,還有其他的現象,啟發著仿生研究團隊發現新的科技方案。



