

 QQ交談
QQ交談請輸入產品關鍵字:

郵編:100043
聯系人:付經理
電話:13366074097/13911336871
傳真:86-010-68683486
手機:13301352827
售后電話:010-6868-2336
留言:發送留言
個性化:www.zunxiangtec.com
網址:www.zunxiang17.com
商鋪:http://www.weixunsd.com/st158966/
Mini V800-Mini V800-手持式數據采集振動分析儀

- 發布日期:
- 有效日期:
- 所 在 地:
- 產 地:
- 已獲點擊:
- 2024年11月8日
- 2025年5月8日
- 北京北京市
- 309次
![]()
【產品簡介】
【詳細說明】
Mini V800-手持式數據采集振動分析儀
Leonova Emerald迷你數采器MINI V800是一款振動分析儀,有聲音記錄和聽診功能等功能,也是一種多功能、手持式數據采集/信號分析儀,用于監測和診斷機械狀態。該儀器通過鍵盤和可編程功能鍵操作,測量用的基本數據可手動輸入或從Condmaster Ruby下載設置。
Leonova Emerald的測量技術總是編程為無限使用的,其他的診斷和分析功能,沖擊脈沖測量、振動測量、轉子平衡,是用戶選擇的。

全新的功能設計
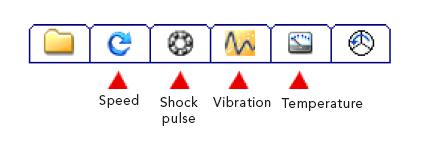
1、沖擊脈沖HD測試技術,專業診斷滾動軸承故障,尤其對于低速滾動軸承監測是企業*;
2、振動測試技術,包含ISO10816振動幅值和振動頻譜;
3、聲音記錄和聽診功能;
4、溫度和轉速測試功能;
5、使用統一平臺軟件CONDMASTERRUBY,兼容所有SPM產品。便于企業綜合管理;
6、手動記錄功能;
7、電子標簽識別功能。
Mini V800-手持式數據采集振動分析儀提供的配件
14661 防靜電腕帶
PRO49 Leonova 服務程序


上面列出的設備是Mini V800-手持式數據采集振動分析儀器的一部分,此外,傳感器和測量電纜是測量所需的,這些都是需要單獨購買的,根據所要實現的測量功能決定。
儀器預覽

可充電電池組
Leonova使用可充電鋰離子電池組,在測量工作中容易更換。在儀器關機前會有一個低電量警告出現,沒有數據會丟失,所有的數據儲存在閃存中,Leonova有一個內置的備用電池可持續多于15年。
這個電池組在新儀器使用前需要進行充電,取出電池組,提起和旋轉鎖緊螺釘(A),之后從儀器拔出電池組。
在Leonova存放長時間(大于6個月)建議給電池組充電,這樣做的原因是電池不能承受被充分*放電。

電池充電器
電池充電器模塊,帶交流適配器,CHA01/02/03/04,提供9.3V/1.33A。交流適配器規定100到240V交流電,50到60赫茲,不要使用任何其他樣式的充電器或交流適配器。
連接交流適配器(100-240V交流)到充電器模塊(B),并將電池組放到充電器模塊中。
充電器模塊也可以連接到汽車里的12V電源,通過汽車充電器電纜 93484。
在充電器正面一個綠色的LED指示電源連接,電荷(紅色LED)在充電時點亮,就緒(綠色LED)在電池充滿電點亮。
一次滿的充電需要4小時,zui大電池容量可達5200mAh,‘電量低’警告在25%的時候給出。
測量的結果默認儲存在閃卡中,如果電量低不會被刪除。

電池適配器 16644
Leonova通過可選的電池適配器(SPM 16644)連接到100-240V交流電上,當使用i.g長時間記錄,替換Leonova上的電池組為電池適配器并將其連接到交流適配器上。

技術參數
Leonova測量功能
Mini V800-手持式數據采集分析儀總是有以下無限使用的測量功能:
-HDm/HDc
-均方根值振動測量依據ISO 2372
-速度測量,轉速和外設。
-溫度測量
-聽診
-聲音評論
-CondID,無線測量點識別
-自動記錄測量結果
用戶可選擇的剩余的測量功能:
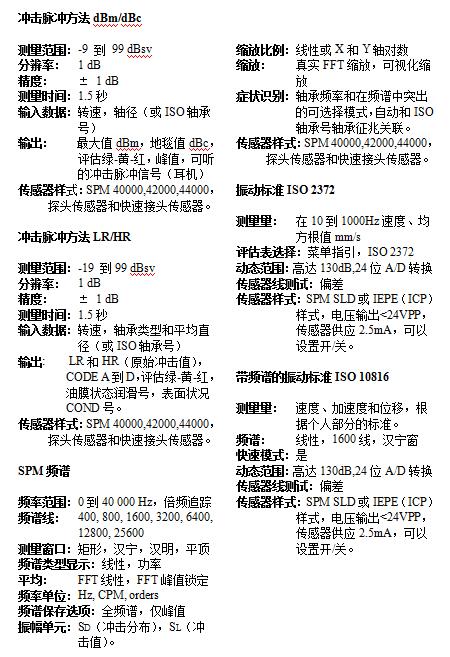
-SPM HD,時域和頻域分析
-帶頻譜的沖擊脈沖測量LR/HR和時域信號
-dBm/dBc和頻譜
-振動測量依照ISO 10816,帶頻譜
-振動專家或振動高級專家為評估振動分析
-平衡,單面
對于每個測量,用戶可以輸入一個文本評論或聲音記錄。

測量模式
Mini V800-手持式數據采集分析儀主要設計是作為一個數據記錄器,測量路徑,完成所有評估測量的輸入數據,當運行SPM軟件Condmaster Ruby從計算機上下載,當測量后,結果上傳到計算機上。
當數據記錄,操作者沿預定路線工作并按‘測量路徑順序’測量,作為替代,CondID記憶標簽可以被附加到機器。一個測量點,屬于一個下載的測量路徑,通過閱讀它的標簽識別,Leonova顯示這個點和它的數據,準備測量。
對于沒有準備的測量,Leonova包含一個‘默認文件’為每個測量技術,當要求,通過編輯默認值手動輸入數據。編輯默認文件可以保存為新的默認文件或作為保留輸入數據和測量結果的用戶文件。
傳感器線質量,TLQ
該儀器可以被設置去執行一個傳感器線質量測試(TLQ)在測量之前,測試在傳感器和儀器之間的信號質量是至關重要的,因為在一個不好的傳感器線,部分的信號會丟失,這個反過來的意味著測量結果將低于它們應該的。
整個傳感器線質量測試的學術的概念是TLQ,根據傳感器使用,以下適用有關的測量的單元和可接受的值。
如果TLQ值超出可接受的值,測量結果不能被保存。
進一步的信息關于TLQ在本手冊各自的測量技術被找到。
測量序列
在Leonova測量,下載特別數據日志,*配置文件,是非常容易。

始終包括的測量技術
Leonova總是編程為無限使用下面列出的測量技術,其它診斷和分析功能,沖擊脈沖測量、振動測量、轉子平衡和軸對中,是用戶選擇。
測量技術總是包括:
-轉速測量
-沖擊脈沖測量HDm/HDc
-均方根振動,ISO 2372
-溫度測量
-聽診
這些測量技術和設備使用需要在本章中介紹,除了SPM HDm/HDc技術在章節D中介紹。
測量點包含免費的技術可以從Condmaster Ruby下載,*配置并為測量準備。
當使用技術窗口的默認文件,模擬量測量和振動測量通常在‘測量點數據’下需要一個配置。
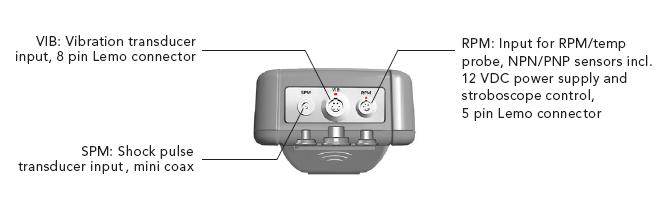
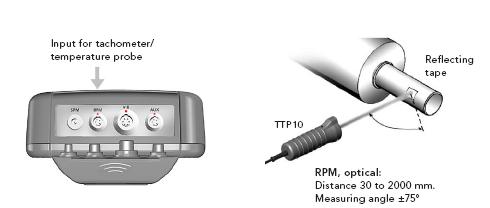
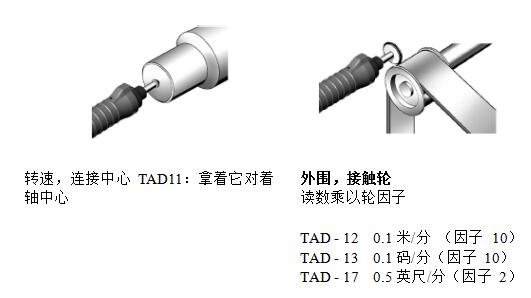
轉速測量
SPM激光測速/紅外溫度探頭TTP10用于光學和接觸轉速測量,它是連接到傳感器輸入在Leonova上標記為RPM。
一個藍色的LED指示器在轉速表和溫度探測器TTP10發亮當反射觸擊傳感器。

CAB90頻閃儀電纜,1.5m螺旋
3.5mm手機連接器
CAB92接近開關電纜,1.5m螺旋,M12連接頭
CAB95 Keyphasor電纜,1.5m螺旋,BNC連接頭
溫度測量
SPM激光測速/紅外溫度探頭TTP10用于溫度測量,范圍在–20到+300 °C (–4 到 +572°F),測量精度是± 2.5°C。
探頭有一個紅外傳感器,讓你準確的測量表面溫度,無需去接觸它。
探頭通過螺旋電纜連接到Leonova轉速輸入接口,它是由儀器供電。
當探頭不使用時保留防護適配器在探頭上。
測量移動激光點以便它在被測量區域并按M/S鍵,確保目標是大于單位的點尺寸,越小的目標,你應該越接近它。

警告:絕不用激光點瞄準某人的眼。
激光測速/紅外溫度探頭的路程比點的尺寸(D/S)8:1,這意味著如果探頭到目標的距離是800mm,物體的直徑必須至少100mm(見旁邊的圖表),當準確性是至關重要的,確保目標至少是兩倍大小的點尺寸。

振動烈度測量
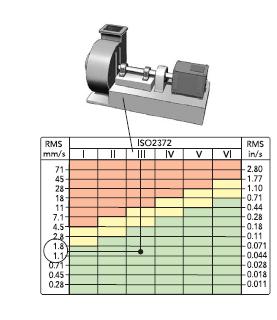
振動烈度測量根據ISO 2372是一個寬帶測量在頻率范圍10到1000赫茲,它返回振動速度的均方根值以mm/s(或英寸/s),這個值是代表機械振動能源,和由此帶來的作用于機械的破壞性力量。它仍然是被廣泛認為是一個好并簡單去獲得一般機械狀況的指標。
評估機械狀況
評估包含一個測量值和ISO極限值的比較,推薦給出6個不同的分類(參閱下一頁的定義)。
大部分的工業機械屬于振動分類2、3和4:
分類2:中等大小的機器沒有特殊的地基
分類3:大型機器在剛性地基上
分類4:大型機器在柔性地基上
例如,在化學工廠大多數較小的運行泵將是分類2,一個100kW風機在混凝土地基上將是分類3,然而,同樣的風機固定在較小剛性的一艘船的金屬甲板上可能被認為是分類4。
分類1指機器的獨立的部件,例如電機知道15kW,分類5和6是用于重型往復式原動力和機器,這是為了振動,例如振動篩。
Mini V800-手持式數據采集分析儀是用ISO極限值編程并評估測量結果,在‘測量點數據’輸入提供ISO機器分類號。在儀器上,ISO值是好并可接受顯示為綠色,可以容忍的是黃色的,不可接受的是紅色。
振動測量點
振動烈度主要是測量一般機器狀態,測量點振動應該代表機器的整體振動。
典型的測量點是軸承座,通過測量三個方向,每個可以得到一個導致振動增加的原因。
-水平振動(H)在平面的旋轉對于平衡狀態是zui有代表性的。
-垂直振動(V)在平面的旋轉對于結構性松動是zui有代表性的。
-軸向振動(A)在沿著軸線對于軸對準和彎軸是zui有代表性的。
得到類似的結果,測量點應該被明顯標志,以便測量總是在同一個點同時比較重要的以同樣的速度。
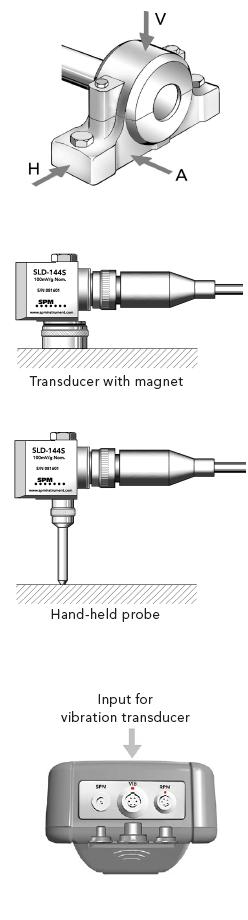
可以使用SPM振動傳感器
-作為一個手持探頭,有或沒有附加探頭*,不推薦1000赫茲以上。
-通過一個磁鐵附加黑色金屬,不推薦2000赫茲以上。
-通過M8(UNC 1/4”-28)安裝螺紋。
越堅固的連接與機器,越好的測量結果,平的,干凈的金屬表面是振動傳感器的接觸。
振動傳感器是通過雙絞線電纜連接到Leonova振動輸入,傳感器類型可用帶電源輸出(<24Vpp)的IEPE* (ICP)。
當測量依據ISO 2372只有一個振動傳感器可以連接到Leonova,在三個方向(H,V,A)之間移動傳感器完成三次測量。
平衡設備
對于單面平衡用四步,*需要的設備是一個振動傳感器類型SLD144或其它IEPE(ICP®)式電壓輸出傳感器。
該傳感器安裝用一個磁腳(TRX16)或一個M8(UNC 1/4”)螺絲,它連接用螺旋電纜CAB82或一個直的10米電纜CAB83。
對于2步方法,一個觸發脈沖是需要的,它提供要么是由一個接近開關要么是SPM轉速計探頭TTP10。
從轉速計探頭發出的激光點是指向一塊貼在軸上的反光條,膠條必須有一個銳邊。
注意!這是非常重要的,轉速計探頭牢固地連著并且在平衡過程中不能移動。
SPM供應一個轉速計探頭磁座架(SPM 81319),一個探頭夾(SPM 14765)和一條10米長的轉速計探頭電纜(SPM CAB83)。

不平衡
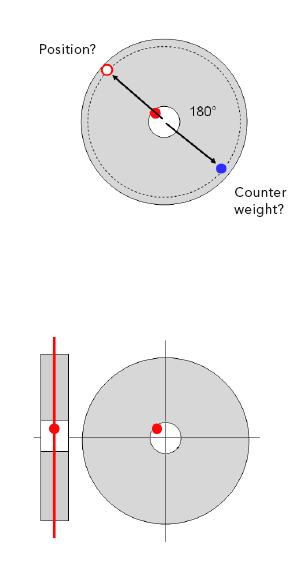
一個轉子是不平衡當質量中心與軸中心并不相切。
這個狀態可以被描述為轉子沿著它周長在某個地方擁有一個‘重的點’。
如果我們知道重的點的位置和重量,我們可以減少它通過去掉質量或者更經常地,放置一個平衡重量在轉子相反的一邊。
對于單面平衡,它假設重的點是在一個狹窄的轉子中心線或足夠接近,所以它不重要對于相反重量放置中心線那邊。
測量不平衡
不平衡導致過度振動,但是,過度振動可以有許多數量的其他原因。因此,試圖平衡轉子之前,我們必須首先檢查實際上就是一種不平衡問題并確保其他振動原因如松動部件和不對中是消除的。
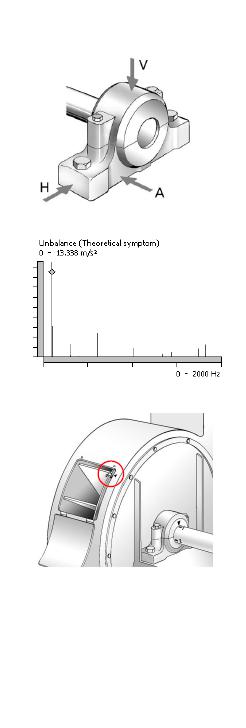
作為‘重的點’旋轉在徑向平面,振動值測量在水平(H)和垂直(V)方向應該高于振動測量在軸向(A)。
檢查所有三個方向,對于平衡,測量方向H或V,取其產生zui高的值。
不平衡引起的振動隨著1X頻率,這是軸頻率以赫茲(轉速/60),也稱為*個階次。
檢查振動頻譜有一個明顯優勢線在1X,這條線被標記在Leonova平衡頻譜。
所有三個平衡方法,使用*步去確立轉子的振動走勢。
下面的步驟是沿著轉子在方便的點固定一個試驗重量,因此,我們添加一個已知的不平衡因素,它可讓我們從振動走勢的改變計算出未知的‘重的點’的位置和質量。
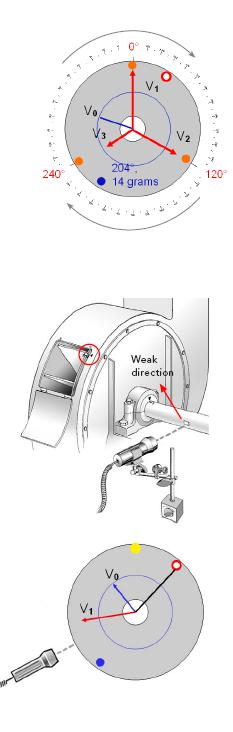
四步方法
使用四步,其中三個相同的試驗重量沿著轉子圓周*固定在0°,然后120°和240°,是傳統的平衡方法。
它是重要的在所有測量運行機器在同一速度。
傳統上,這個不平衡重量的位置和重量計算通過繪制一個振動矢量圖,這部分的工作現在由Leonova完成:在zui后一步之后,儀器上顯示平衡重量以克(盎司)和它的位置以度(測量的點是*次試驗重量放置的位置)。
兩步方法
兩步方法使用同步振動測量,這要求一個觸發脈沖從一個轉速計,每個測量開始在*相同的軸位置。
這個轉速計的位置成為參考系統的部分要求計算角度在0°(試驗重量的位置),‘重的點’的位置和通過試驗重量人工產生不平衡的位置之間。
轉速計在測量時不能被移動。
北京樽祥科技有限責任公司擁有*的技術解決方案和優秀的專業技術人才以及完善的優質的售后服務,具有從事過程控制儀器儀表、檢測儀器和控制系統總成套的能力,已成功地為用戶提供各種規模的自動控制成套設備和儀器儀表,樽祥相關網zximd.com/。