



| 應用領域 | 電子 |
|---|
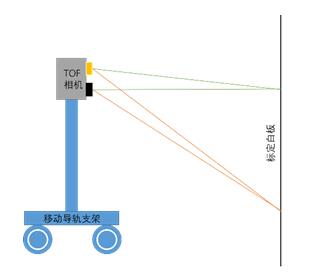
對于傳感器如果測量值與實際值之間存在固定的偏差時,通常的做法就是重新標定,在測量值和實際值之間建立映射關系。對TOF相機而言可以把相機固定在導軌上,對著一堵白墻測距,把每一個像素點的測量值和白墻成像區域與相機之間的距離建立起對應關系,再根據這種對應關系,在測量值上進行修正就可以獲得較為準確的距離值。
如果這還不能解決,看看相機安裝是否有問題。
TOF相機是一種主動測距方式,測量的準度受很多因素干擾,其中安裝不合適的話有可能會引入多路徑等問題,導致測距準度失真。
移動機器人在行走過程中,通常需要對行駛路徑上靜態或者動態的物體或者凹坑進行甄別,然后停止等待障礙物人為移除,即停障,或者按照一定的算法實時更新路徑,繞過障礙物終到達目標點,即繞障。
移動機器人要想實現安全避障第壹步便是對環境進行感知。就繞障來說,移動機器人需要通過傳感器實時獲取自身周圍障礙物信息,包括尺寸、形狀和位置等信息。在避障方式上,各家的避障傳感器種類繁多,但無外乎單點紅外傳感器,單線激光雷達、超聲波傳感器、碰撞條以及視覺傳感器。
藍芯科技是以計算機視覺為核心技術,利用人工智能技術結合深度視覺感知傳感器讓機器“慧”做事。公司出品的移動機器人采用自研的Eagle系列視覺避障傳感器結合多種傳感器進行自主避障,優勢在于可以根據不同的應用需求定制化避障傳感器性能參數。

叉車和料箱車避障:
其采用Eagle系列LXPS-Eagle-I320-U/LXPS-Eagle-I320-E傳感器進行避障,傳感器詳細規格參數如下:
測距范圍: 0.5-6m(遠測距12m)
測距精度: 1% @ 2m 70%反射率
視場角: 72°X 55°;
分辨率: 320*240
幀率: 20fps
數據接口: USB3.0/Ethernet
相機尺寸: 43mm×78mm×38mm
運行環境: -10℃-70℃
陽光抑制: 50klux


 采購中心
采購中心
 化工儀器網
化工儀器網